Introduction
The Vollo SDK is designed for low latency streaming inference of machine learning (ML) models on FPGA platforms.
Evaluation
You can easily discover the latency Vollo can achieve for your models, without needing an FPGA or a Vollo license. Use the online Vollo Sandbox.
Alternatively, you can download and install the Vollo SDK on your own computer if you wish to evaluate Vollo offline. You won't need an FPGA or a Vollo license for this either. See Getting Started for details.
User Guide Overview
This document outlines the following:
- Installation
- Key features of Vollo
- Steps to get started with Vollo
- The Vollo Compiler API
- The Vollo Runtime API
- Hardware requirements and setup
Installation
The latest SDK is available for download from https://github.com/MyrtleSoftware/vollo-sdk/releases.
Download the vollo-sdk-<version>.run self-extractable archive and execute it
to extract the Vollo SDK contents to the current directory.
chmod +x vollo-sdk-<version>.run
./vollo-sdk-<version>.run
Key Features
Vollo accelerates machine learning inference for low latency streaming models typically found in financial trading or fraud detection systems such as:
- Market predictions
- Risk analysis
- Anomaly detection
- Portfolio optimisation
Vollo is able to process of range of models, including models which maintain state while streaming such as recurrent models and convolutional models.
Key characteristics of Vollo are:
- Low latency inference of machine learning models, typically between 2-10μs.
- High accuracy inference through use of Brain Floating Point 16 (bfloat16) numerical format.
- High density processing in a 1U server form factor suitable for co-located server deployment.
- Compiles a range of PyTorch models for use on the accelerator.
Getting Started
You can get started with evaluating your ML model's performance on Vollo using the Vollo compiler and Vollo virtual machine (VM), which don't require an FPGA accelerator.
When you are ready, you can run inferences with your model on a Vollo FPGA accelerator using an evaluation license.
Performance estimation and model design with the Vollo compiler
You can use the Vollo compiler and VM to compile and estimate the performance of your model in an ML user's environment without any accelerator.

The Vollo compiler and Vollo VM execution time is typically on the order of seconds, enabling fast model iteration for tuning models to meet a latency target.
To estimate performance of your model with the Vollo SDK:
-
Download and extract the Vollo SDK.
-
Install the Vollo compiler Python libraries.
-
Compile your model using the Vollo compiler and run the compiled model in the Vollo VM to generate a compute latency estimate that will be achieved with Vollo.
See Vollo compiler Example 1 for a fully worked example of this including performance estimation.
-
Add in IO latency for your model characteristics in order to estimate end to end latency.
-
Iterate on your model architecture to meet your combined latency and accuracy requirements.
Validating inference performance using the Vollo FPGA accelerator
When you are ready to run inferences with your models on a Vollo accelerator, you will need a compatible FPGA based PCIe accelerator card and a Vollo license.
Evaluation licenses can be provided free of charge by contacting vollo@myrtle.ai.

To validate inference performance on Vollo:
-
Follow the steps to program the Intel Agilex, AMD V80 or Silicom Artena and license the FPGA.
-
Compile your model and save it as a
.volloprogram file using the Vollo compiler.See Vollo compiler Example 1 for a fully worked example.
-
Run and benchmark your model on the accelerator using the Vollo runtime C example.
Make sure to pass the example application the path to your saved
.volloprogram when you invoke it on the command line.
Note that the Vollo SDK includes prebuilt FPGA bitstreams for selected PCIe accelerator cards so no FPGA compilation or configuration is required after initial accelerator setup. As a result loading user models to run on Vollo takes under a second, enabling fast onboard iteration and evaluation of different models.
Vollo Compiler
The Vollo compiler is made up of 2 Python libraries:
- The
vollo-torchPyTorch frontend to the compiler. - The
vollo-compilerbackend that can transform and compile a model to a Vollo program (.vollofile).
The Vollo Runtime section describes how to run a Vollo program on a Vollo accelerator. The Vollo compiler API also includes functionality to simulate and estimate performance of Vollo programs.
Installation
Set up Vollo environment variables by sourcing
setup.sh in bash
from the Vollo SDK root directory.
Install the wheel files for the Vollo compiler libraries. It's recommended that you install these into a virtual environment.
Note: the packaged wheels only support python 3.7 or greater
python3 -m venv vollo-venv
source vollo-venv/bin/activate
pip install --upgrade pip
pip install "$VOLLO_SDK"/python/*.whl
API Reference
This chapter walks through examples of how to use the Vollo compiler that should cover the most commonly used parts of the API.
The API Reference contains a more complete list of all available classes and methods.
Supported Models
The Vollo compiler supports PyTorch models that use the following operations:
| Operation | Support Notes | Fp32 Support |
|---|---|---|
| Pointwise arithmetic ops | +, -, *, /, maximum, minimum, the pointwise overload of max and min | ✅ +, -, *, maximum, minimum |
| Inequality | >, <, >=, <= | ✅ |
| Clamp ops | clamp, relu | ✅ |
| Matrix multiplication | Linear; matmul / @ where one side is a constant | ❌ |
| Convolution | torch.nn.Conv1d, vollo_torch.nn.PaddedConv1d; with groups == 1 or groups == in_channels == out_channels | ❌ |
| Pooling | torch.nn.MaxPool1d, torch.nn.functional.max_pool1d; with padding = 0 and ceil_mode = False | ✅ |
| LSTM | torch.nn.LSTM, vollo_torch.nn.LSTM | ❌ |
| Indexing / slicing | Partial square bracket [] support; index_select, narrow | ✅ |
sum | keepdim = True required when summing over data dimension | ❌ |
where | If the where condition is an inequality comparison | ✅ |
| Concatenation | cat, concat, concatenate | ✅ |
| Stacking | stack, vstack, row_stack, hstack, column_stack, dstack | ✅ |
LayerNorm | ❌ | |
RMSNorm | via vollo_torch.nn.RMSNorm for torch versions < 2.4 | ❌ |
| Batch Normalization | BatchNorm1d, BatchNorm2d, BatchNorm3d | ✅ |
| Transposing | transpose, swapdims, swapaxes, t, T, mT, permute; See data dimension | ✅ |
squeeze, unsqueeze | ✅ | |
| Reshaping | reshape, view, reshape_as, view_as, flatten; Stride of data dimension must be unchanged | ✅ |
| Broadcasting | Implicitly or with broadcast_to, broadcast_tensors, expand, expand_as | ✅ |
sqrt | torch.sqrt, torch.rsqrt | ❌ |
tanh | torch.tanh, torch.nn.Tanh | ❌ |
| Exponential | torch.exp, torch.exp2 | ✅ |
silu | torch.nn.functional.silu, torch.nn.SiLU | ❌ |
softplus | torch.nn.functional.softplus, torch.nn.Softplus | ❌ |
softmax | torch.softmax, torch.nn.Softmax | ❌ |
sigmoid | torch.sigmoid, torch.nn.functional.sigmoid, torch.nn.Sigmoid | ❌ |
gelu | torch.nn.functional.gelu, torch.nn.GELU | ❌ |
Models that take multiple input tensors and return multiple output tensors (i.e. a tuple of tensors) are supported.
Note that for operations like Dropout and BatchNorm1d (which change behaviour at inference time) to be handled correctly, the model should be in eval mode.
TorchScript
The Vollo compiler supports standard PyTorch modules (torch.nn.Module); it
does not support TorchScript modules (torch.jit.ScriptModule).
Example 1: MLP
Basic models like multilayer perceptrons (MLP) can be defined without any changes from a standard PyTorch definition.
import torch
import torch.nn as nn
import torch.nn.functional as F
class MLP(nn.Module):
def __init__(self, input_size, output_size, hidden_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.out = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
residual = x
x = F.relu(self.fc2(x)) + residual
return self.out(x)
# Instantiate the model
input_size = 784
output_size = 10
hidden_size = 128
model = MLP(input_size, output_size, hidden_size)
The first stage of compiling a model is to lower it to NNIR. NNIR is the Vollo compiler's intermediate representation for representing neural network graphs. NNIR sits at a similar level of abstraction to ONNX, with most NNIR operators having direct ONNX or PyTorch analogues.
import vollo_torch
# An input to the model needs to be provided so that its execution can be
# traced
input = torch.randn(input_size)
# Trace the model's execution to annotate it with activation shapes
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
NNIR can be compiled to a Vollo program given a Vollo accelerator configuration. You can find the preset configurations that can be instantiated in the API reference.
import vollo_compiler
# Replace the Config in the line below with the Config for the accelerator you
# are using
config = vollo_compiler.Config.amd_v80_c6b32()
program = nnir.to_program(config)
Vollo programs have all their memory allocated statically. You can print the static resource usage of a program like this:
print(program.metrics())
Save the program to a file so that it can be used for inference by the Vollo runtime.
program.save('mlp.vollo')
Simulation
The Vollo compiler can be used to simulate programs in the Vollo virtual machine (VM). This is an instruction level simulation of the Vollo accelerator which can be used to:
- Estimate performance of a model. The VM is not cycle accurate but provides an indicative cycle count of a model.
- Verify the correctness of the compilation stages, including the effect of quantisation.
Construct a VM instance with your program loaded. Run the VM by passing it a numpy array of the input. It should produce the same result as the source PyTorch model, within some range of floating point error.
vm = program.to_vm()
vm_output = vm.run(input.detach().numpy())
torch.testing.assert_close(expected_output, torch.from_numpy(vm_output), atol = 1e-2, rtol = 1e-2)
print("cycle count:", program.cycle_count_per_inference())
# Translate the estimated cycle count to a duration for the compute (not
# including IO) in microseconds, using the bitstream clock speed (320 MHz)
print(f"latency (compute): {program.compute_duration_per_inference_us():.1f}us")
The VM records the number of cycles the program took to execute.
Note there will be some discrepancy between the VM's cycle count and the true
cycle count, so the VM's cycle count should be treated as an estimate.
Also note that the VM does not model the latency of the communication between
the host and the Vollo accelerator. This communication latency can be estimated
using our IO Round Trip benchmarks.
Example 2: CNN
Vollo supports both streaming and non-streaming 1D convolutional neural networks (CNNs).
A streaming convolution applies the convolutional kernel to the most recent window of the input sequence as the data points in the input sequence arrive. This differs from a non-streaming convolution, which expects to receive a complete input sequence and applies its convolutional kernel to each window of that input.
Streaming convolutions will have much lower latency than non-streaming
convolutions, but they have to maintain some state, namely the most recent
window of input, making them unnatural to define in ML frameworks like PyTorch.
To enable the use of of streaming convolutions, the Vollo compiler includes a
streaming_transform which transforms a non-streaming CNN into a streaming CNN,
as long as the non-streaming CNN meets certain constraints.
Non-streaming CNN
To compile a CNN as a non-streaming model, you can follow the steps outlined in Example 1: MLP.
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_compiler
import vollo_torch
class CNN(nn.Module):
def __init__(self, in_channels, out_channels, hidden_channels, kernel_size=3):
super().__init__()
self.conv1 = nn.Conv1d(in_channels, hidden_channels, kernel_size)
self.conv2 = nn.Conv1d(hidden_channels, out_channels, kernel_size)
def forward(self, x):
x = x.transpose(-1, -2)
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
x = x.transpose(-1, -2)
return x
in_channels = 32
out_channels = 1
hidden_channels = 128
sequence_length = 6
model = CNN(in_channels, out_channels, hidden_channels)
input = torch.randn(sequence_length, in_channels)
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
# Replace this config with the one for the accelerator you are using
config = vollo_compiler.Config.amd_v80_c6b32()
program = nnir.to_program(config)
The example above gives a Vollo program which takes an input tensor of size
6 x 32 and outputs a tensor of size 2 x 1.
The transposes are needed because Vollo performs matrix multiplication on the second-last (channels) dimension — see The data dimension for details.
As in Example 1: MLP we can construct a VM instance to simulate the Vollo accelerator, giving bit-accurate results and a latency estimate.
vm = program.to_vm()
vm_output = vm.run(input.detach().numpy())
torch.testing.assert_close(expected_output, torch.from_numpy(vm_output), atol=1e-2, rtol=1e-2)
print(f"latency (compute): {program.compute_duration_per_inference_us():.1f}us")
Using the streaming_transform
Starting from the non-streaming CNN model defined above, in order to apply the
streaming_transform the torch.nn.Conv1d layers need to be replaced with
vollo_torch.nn.PaddedConv1d layers.
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_torch.nn
class CNN(nn.Module):
def __init__(self, in_channels, out_channels, hidden_channels, kernel_size=3):
super().__init__()
self.conv1 = vollo_torch.nn.PaddedConv1d(in_channels, hidden_channels, kernel_size)
self.conv2 = vollo_torch.nn.PaddedConv1d(hidden_channels, out_channels, kernel_size)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
return x
# Instantiate the model
in_channels = 32
out_channels = 1
hidden_channels = 128
model = CNN(in_channels, out_channels, hidden_channels)
These PaddedConv1d layers are identical to torch.nn.Conv1d, but with left
padding pre-applied to the input so as not to reduce the sequence length.
Note that PaddedConv1d only supports stride=1, since a stride greater than 1
would produce fewer output elements than input elements, breaking the
one-to-one correspondence required by the streaming model.
This PaddedConv1d model is still a non-streaming model, which now takes an
input sequence of length 5 and produces an output of length 5.
Its relationship to the original Conv1d model is that, given the same model
parameters (weights, biases, etc.) and input sequence, the last element of the
output sequence of the PaddedConv1d model will be equal to the last/only
element of the output sequence of the Conv1d model.
The PaddedConv1d model can be lowered to NNIR and have the
streaming_transform applied.
batch_size = 1
sequence_length = 5
input = torch.randn(batch_size, in_channels, sequence_length)
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
# Provide the streaming transform with index of the sequence axis
(nnir, output_axis) = nnir.streaming_transform(2)
The resulting NNIR graph represents a streaming CNN, i.e. containing state, that takes a single data point of a sequence as input and produces a single data point as output, updating its input window state in the process. Input sequences for the streaming CNN need to be fed in sequentially, e.g. in a loop. For example, using the VM:
import vollo_compiler
# Replace the Config in the line below with the Config for the accelerator you
# are using
program = nnir.to_program(vollo_compiler.Config.amd_v80_c6b32())
vm = program.to_vm()
vm_outputs = []
for i in range(5):
# Runs inference on one element of the input sequence, updating the
# streaming CNN's state
vm_outputs.append(vm.run(input[:, :, i].detach().numpy()))
torch.testing.assert_close(
expected_output,
torch.stack(
[torch.from_numpy(output) for output in vm_outputs],
axis=output_axis,
),
atol = 1e-2,
rtol = 1e-2
)
The streaming CNN satisfies the property that, given an input sequence, the i-th element of the output sequence of the non-streaming CNN will be equal to the output of the i-th iteration of feeding the input to the streaming CNN.
The streaming CNN can be saved and run on the accelerator like any other program:
program.save('cnn.vollo')
Example 3: LSTM
Vollo supports both streaming and non-streaming LSTM models.
Non-streaming LSTM model
To compile an LSTM model as a non-streaming model, you can follow the steps outlined in Example 1: MLP of lowering the model to NNIR, and then compiling it with an accelerator config.
import torch
import torch.nn as nn
import vollo_compiler
import vollo_torch
class LstmNet(nn.Module):
def __init__(self, input_size, hidden_size, num_layers, output_size):
super().__init__()
self.lstm = nn.LSTM(input_size, hidden_size, num_layers=num_layers)
self.linear = nn.Linear(hidden_size, output_size)
def forward(self, x):
x, _ = self.lstm(x)
x = self.linear(x)
return x
input_size = 128
hidden_size = 256
num_layers = 2
output_size = 16
model = LstmNet(input_size, hidden_size, num_layers, output_size)
seq_length = 20
input = torch.randn(seq_length, input_size)
# Trace the model's execution to annotate it with activation shapes
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
# Replace this config with the one for the accelerator you are using
config = vollo_compiler.Config.amd_v80_c6b32()
program = nnir.to_program(config)
The example above will give a Vollo program which takes an input tensor of size 20 x 128,
and will output a tensor of size 20 x 16. This is a non-streaming LSTM model, since it takes
an entire sequence as input.
As in Example 1: MLP we can construct a VM instance to simulate the Vollo accelerator, allowing us to get bit-accurate results from the compiled model, and a latency estimate.
vm = program.to_vm()
vm_output = vm.run(input.detach().numpy())
torch.testing.assert_close(expected_output, torch.from_numpy(vm_output), atol = 1e-2, rtol = 1e-2)
print(f"latency (compute): {program.compute_duration_per_inference_us():.1f}us")
Streaming LSTM model
If you want the LSTM model to operate on an ongoing stream of data as its input sequence, it is probably
more desirable to use a streaming LSTM model. We can use the same PyTorch model defined above. The only additional
step required is to call the streaming_transform (detailed in Example 2: CNN) on the NNIR:
input_size = 128
hidden_size = 256
num_layers = 2
output_size = 16
model = LstmNet(input_size, hidden_size, num_layers, output_size)
seq_length = 20
input = torch.randn(seq_length, input_size)
# Trace the model's execution to annotate it with activation shapes
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
# We provide the streaming transform with the sequence axis to 'stream' over.
(nnir, output_streaming_axis) = nnir.streaming_transform(0)
assert(output_streaming_axis == 0)
Here, the streaming_transform tells the compiler to treat axis 0 as the sequence
dimension, and that we intend to provide the program with a single sequence element
per inference. I.e. on each inference, we pass in a tensor of size 128 and receive a
tensor of size 16 on each inference. The resulting Vollo program is stateful, and will
update the internal hidden state and cell state on each inference.
Note that this streaming model will have a much lower latency on Vollo than the non-streaming model.
The streaming model only needs to run num_layers = 2 LSTM operations per inference, where the non-streaming
model needs to run num_layers * seq_length = 2 * 20 LSTM operations per inference.
As above, we can now compile this streaming NNIR to a program with a chosen accelerator configuration, and test the program with a VM:
# Replace the Config in the line below with the Config for the accelerator you
# are using
program = nnir.to_program(vollo_compiler.Config.amd_v80_c6b32())
vm = program.to_vm()
vm_outputs = []
for i in range(seq_length):
# Note that the VM takes a single sequence element per run
vm_outputs.append(vm.run(input[i, :].detach().numpy()))
torch.testing.assert_close(
expected_output,
torch.stack(
[torch.from_numpy(output) for output in vm_outputs],
axis=output_streaming_axis,
),
atol = 1e-2,
rtol = 1e-2
)
print(f"latency (compute): {program.compute_duration_per_inference_us():.1f}us")
Resetting model state
When running a model, it can be reset to its initial state if it was compiled with
generate_state_reset = True. Note that this causes the program to use additional
resources, so may affect latency or cause the model to no longer fit.
program = nnir.to_program(vollo_compiler.Config.amd_v80_c6b32(), generate_state_reset=True)
See the Vollo RT Example for an example of how to then reset the model when running inferences.
Example 4: Mixed Precision
By default, operations on Vollo run in bfloat16 (BF16) format1, but there is support for some operations to be run in float32 (FP32) and for weights to be stored in 8-bit floating point (FP8, specifically E4M3).
FP32 Activations
See Supported Models for a list of which operations have FP32 support.
To run operations in FP32, the operations should be placed in a vollo_torch.Fp32Activations context. The following example
shows an MLP with some pre-processing on its inputs in FP32:
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_torch
class PreprocessMLP(nn.Module):
def __init__(self, input_size, output_size, hidden_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.out = nn.Linear(hidden_size, output_size)
def forward(self, x, y):
with vollo_torch.Fp32Activations():
z = x + 0.763 * y
z = torch.clamp(z, -2.633, 2.633)
z = F.relu(self.fc1(z))
residual = z
z = F.relu(self.fc2(z)) + residual
return self.out(z)
input_size = 784
output_size = 10
hidden_size = 128
model = PreprocessMLP(input_size, output_size, hidden_size)
The inputs and outputs of a model can also be FP32. The default precision is BF16; if FP32 is required this must be
specified when calling to_nnir:
import vollo_compiler
inputs = [torch.randn(input_size), torch.randn(input_size)]
(model, expected_output) = vollo_torch.fx.prepare_shape(model, *inputs)
nnir = vollo_torch.fx.nnir.to_nnir(
model,
inputs_precisions = [vollo_compiler.NumberFormat.FP32, vollo_compiler.NumberFormat.FP32],
outputs_precisions = [vollo_compiler.NumberFormat.BF16]
)
# Note that the printed NNIR will be annotated with the precisions of each layer
# (See the activation_precision fields of the layers)
print(nnir)
Note that the model's inputs_precisions and outputs_precisions will determine what type of data format is sent/received between the Vollo runtime and the Vollo accelerator. If possible, it is best to make the precisions in the model match the
precisions of data you will be providing to the runtime. If these precisions do not match, the values will be converted in software
by the runtime, which can be slow.
config = vollo_compiler.Config.amd_v80_c6b32()
program = nnir.to_program(config)
FP8 Weights
Weight matrices of Linear, Conv1d, and LSTM operations can be stored in FP8 to halve the
amount of space used by them.
Note that FP8 is only used as the storage format, not the compute format; the weights are converted to BF16 before being used.
To use FP8 weights, the operations with FP8 weights should be placed in a vollo_torch.Fp8Weights
context. In the following example, the first two linear layers of the MLP will have their weights
stored in FP8, while the output layer will have its weights stored in BF16:
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_torch
class Fp8MLP(nn.Module):
def __init__(self, input_size, output_size, hidden_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.out = nn.Linear(hidden_size, output_size)
def forward(self, x):
with vollo_torch.Fp8Weights():
x = F.relu(self.fc1(x))
residual = x
x = F.relu(self.fc2(x)) + residual
return self.out(x)
input_size = 784
output_size = 10
hidden_size = 128
model = Fp8MLP(input_size, output_size, hidden_size)
You can compile the model and print the program metrics to see that the model uses less space for weights than the BF16 version of the model in Example 1: MLP:
import vollo_compiler
input = torch.randn(input_size)
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
config = vollo_compiler.Config.amd_v80_c6b32()
program = nnir.to_program(config)
print(program.metrics())
Note that only constant weights can be stored in the FP8 format. To ensure predictable behaviour, whenever an Linear or MatMul with that requires dynamic weights is declared inside the context we reject it:
class UnsupportedDynamicMatMulInFP8(nn.Module):
def __init__(self):
super().__init__()
def forward(self, x):
with vollo_torch.Fp8Weights():
x = x @ torch.unsqueeze(x, 1)
return x
input_size = 784
model = UnsupportedDynamicMatMulInFP8()
import vollo_compiler
input = torch.randn(input_size)
(model, _expected_output) = vollo_torch.fx.prepare_shape(model, input)
nnir = vollo_torch.fx.nnir.to_nnir(model)
config = vollo_compiler.Config.amd_v80_c6b32()
try:
program = nnir.to_program(config, allow_dynamic_weights=True)
except Exception as e:
print(f"{e}")
else:
raise Exception("`to_program` expected to throw an exception")
This is true of most operations, however intermediate values in layer calculations are sometimes stored in higher precision, e.g. in the accumulation of dot products.
Example 5: Multiple Models in a Vollo Program
Vollo supports putting multiple models on a single accelerator.
Multiple NNIRs can be compiled into a single program:
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_torch
class MLP(nn.Module):
def __init__(self, input_size, output_size, hidden_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.out = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
residual = x
x = F.relu(self.fc2(x)) + residual
return self.out(x)
# Instantiate an MLP
input_size = 784
output_size = 10
hidden_size = 128
mlp_model = MLP(input_size, output_size, hidden_size)
mlp_input = torch.randn(input_size)
(mlp_model, mlp_expected_output) = vollo_torch.fx.prepare_shape(mlp_model, mlp_input)
mlp_nnir = vollo_torch.fx.nnir.to_nnir(mlp_model)
class CNN(nn.Module):
def __init__(self, in_channels, out_channels, hidden_channels, kernel_size=3):
super().__init__()
self.conv1 = vollo_torch.nn.PaddedConv1d(in_channels, hidden_channels, kernel_size)
self.conv2 = vollo_torch.nn.PaddedConv1d(hidden_channels, out_channels, kernel_size)
def forward(self, x):
x = F.relu(self.conv1(x))
x = F.relu(self.conv2(x))
return x
# Instantiate a CNN
in_channels = 32
out_channels = 1
hidden_channels = 128
cnn_model = CNN(in_channels, out_channels, hidden_channels)
batch_size = 1
sequence_length = 5
cnn_input = torch.randn(batch_size, in_channels, sequence_length)
(cnn_model, cnn_expected_output) = vollo_torch.fx.prepare_shape(cnn_model, cnn_input)
cnn_nnir = vollo_torch.fx.nnir.to_nnir(cnn_model)
(cnn_nnir, output_axis) = cnn_nnir.streaming_transform(2)
# Compile the multi-model program
import vollo_compiler
# Replace the Config in the line below with the Config for the accelerator you
# are using
program_builder = vollo_compiler.ProgramBuilder(vollo_compiler.Config.amd_v80_c6b32())
program_builder.add_nnir(mlp_nnir)
program_builder.add_nnir(cnn_nnir)
multi_model_program = program_builder.to_program()
The vollo_compiler.ProgramBuilder allows you to create a multi-model program. Building a multi-model program may give an allocation error if
the models can't fit on the given Config. Generally each individual model will only have a small latency overhead compared to running it as an individual program. This overhead comes from selecting which model to run.
A model_index can be provided when running inferences on the accelerator or on the VM. The models appear in the order in which they were added to the ProgramBuilder. For example on the VM:
vm = multi_model_program.to_vm()
mlp_vm_output = vm.run(mlp_input.detach().numpy(), model_index = 0)
torch.testing.assert_close(mlp_expected_output, torch.from_numpy(mlp_vm_output), atol = 1e-2, rtol = 1e-2)
cnn_vm_outputs = []
for i in range(5):
cnn_vm_outputs.append(vm.run(cnn_input[:, :, i].detach().numpy(), model_index = 1))
torch.testing.assert_close(
cnn_expected_output,
torch.stack(
[torch.from_numpy(output) for output in cnn_vm_outputs],
axis=output_axis,
),
atol = 1e-2,
rtol = 1e-2
)
The data dimension
For a model to compile on Vollo, in addition to the normal tensor rank/extent constraints on algorithms/functions, an additional constraint on the data dimension must be satisfied. Conceptually, the data dimension is the contiguous dimension of a tensor, it transforms and constrains algorithms according to the rules below.
In most use cases the data dimension is completely opaque, the Vollo compiler will deduce it and the program will compile without changes.
For the remainder of this page:
- We represent an
n-dimensional (a.k.a. rank-n) tensors as[a b! c], in this example a rank-3 tensor with extentsa,band,c. - The dimension with a
!is the data dimension. - Tensors that are compile-time constants (like weights) don't have a data dimension.
Pointwise
Shape and data dimension must match.
[a b! c] (*) [a b! c] -> [a b! c]
Where (*) is any pointwise operation, e.g. +, -, *, /, maximum,
minimum, the pointwise overload of max and min, etc.
Slicing
This preserves the data dimension.
A slice on the data dimension:
[a b c!][:, :, :n] -> [a b n!]
Non data-dimension slice:
[a b! c][:, :, :n] -> [a b! n]
A non data-dimension slice is free (no compute).
Unsqueeze (a.k.a. new-axis)
You can add a new axis anywhere, the new axis is never the data dimension:
[a! b].unsqueeze(dim=0) -> [1 a! b]
Broadcasting
You can broadcast along a non data-dimension:
[1 b!] -> [n b!]
Or along the data dimension:
[a 1!] -> [a n!]
Broadcasting a non data-dimension is free (no compute), and broadcasting the data dimension is close to free.
Concatenation
Similar to a pointwise operation, shape and data dimension of each concatenated tensor must match.
Along the data dimension:
[a! b c].repeat(n, dim=0) -> [(a * n)! b c]
Non data-dimension:
[a! b c].repeat(n, dim=1) -> [a! (b * n) c]
A non data-dimension concatenation is free (no compute).
Note: stacking is the same but with a new-axis before the concatenation.
Reduction
In general reductions preserve the position of the data dimension.
Along the data dimension:
[a! b].sum(dim=0) -> [1! b]
Non data-dimension reduction (generally slower):
[a! b].sum(dim=1) -> [a!]
Note: keepdim must be used in the former and is optional in the latter.
Matrix multiplication
These operations transform the data dimension in non-obvious ways, here we use
* do denote any number of commensurate broadcast dimensions, none of which
are allowed to be the data dimension.
With one side a compile-time constant, in this case the LHS (WLOG):
[* i j] @ [* j! k] -> [* i! k]
That is, the data dimension must be along the contracted dimension of the runtime tensor. The output data dimension is along the "replaced" index.
Note: a linear layer is a special case of the above with the k dimension
squeezed out.
Dynamic weights
Vollo supports a broader range of matrix multiplication via the Dynamic Weights feature. We define a Constant to be any compile-time constant tensor and an Activation to be any tensor that is not a compile-time constant. The Dynamic Weights feature covers the Constant x Activation case where contraction is not along the data dimension of the activation as well as Activation x Activation matrix multiplication.
This is an advanced feature with non-obvious performance characteristics and is
gated behind the allow_dynamic_weights flag.
-
Constant x Activation with data dimension on the non-contracted dimension:
[* i j] @ [* j k!] -> [* i k!]That is, the data dimension of the non-constant tensor is preserved in the output. This potentially has a higher latency and consumes more tensor RAM than contracting along the data dimension.
-
matrix Activation x vector Activation:
[* i! j] @ [j!] -> [* i!] [* i j!] @ [j!] -> [* i!] [j!] @ [* j! k] -> [* k!] [j!] @ [* j k!] -> [* k!]That is, output data dimension is along the "replaced" index.
-
Activation x Activation with opposite data dimensions:
[* i! j] @ [* j! k] -> [* i! k] [* i j!] @ [* j k!] -> [* i k!]That is, when the contracted dimension is the data dimension of exactly one of the input tensors. The output data dimension is that of the side whose data dimension was not contracted.
-
Activation x Activation with contracted data dimensions:
[* i j!] @ [* j! k] -> [* i k!]Note that in this case the output data dimension is determined by convention to be the rightmost output dimension. It can be adjusted by changing the matmul inputs order in the model:
[* j! k].t() -> [* k j!] @ -> [* k i!] [* i j!].t() -> [* j! i] -
unsupported Activation x Activation:
[* i! j] @ [* j k!] -> #This case is unsupported.
Transpose
Tensors can be transposed without restriction. If one of the transposed dimensions is the data dimension, the data dimension is transposed to that dimension:
[a! b c d].transpose(0, 2) -> [c b a! d]
Reshape
For a given tensor's extents, e.g. [a b c], each dimension has a stride equal
to the product of all dimensions to its right, i.e. [(b * c) c 1]. The stride
of the data dimension must/will be preserved during a reshape. For example:
[a! (b * c)] -> [a! b c]
Is valid because the stride of the data dimension is b * c before and after.
[a b c!] -> [b a c!]
Is valid because the stride of the data dimension is 1 before and after.
[a b! c] -> [(a * b)! c]
Is valid because the stride of the data dimension is c before and after, similarly:
[a (n * b)! c] -> [a n b! c]
Note: that the resultant data dimension is deduced to b! rather than n! to
uphold the stride requirement.
However:
[a b! c] -> [a (b * c)!]
Is invalid because the stride of the data dimension is c before but 1 after.
If the output shape has multiple candidate dimensions with the input data dimension's stride (note that these candidate dimensions are all consecutive and all but the leftmost have extent 1), the leftmost of them will be chosen as the output data dimension:
[a! b] -> [a! 1 b]
A reshape that doesn't change the extent of the data dimension is free (no compute).
Note: the strides discussed in this subsection are conceptual and not related to the strides of the tensors queryable from PyTorch etc.
ONNX Support
Vollo also provides a tool for compiling ML models defined in ONNX.
vollo-onnx is a command line tool which allows the user to specify an input ONNX file and produces a .vollo program as output. The user specifies a path to the input .onnx file:
Arguments:
<INPUT>
Path to the input .onnx file
The user can specify:
-
The output path:
-o, --output <OUTPUT> Output path for the compiled program file [default: program.vollo] -
A name for the model:
--model-name <MODEL_NAME> Name of the model -
The hardware configuration to use based on a JSON file (this JSON file can be generated using the
Configmethodsavein thevollo_compilerpython module):--hw-config <HW_CONFIG_JSON> Path to the hardware config JSON file -
A name for the hardware configuration to use (from a set of preset configs).
--hw-config-preset <PRESET_NAME> Hardware configuration to use, chosen from a set of presets [possible values: ia420f-c6b32, ia840f-c3b64, ia840f-c2b64d, v80-c6b32] -
Which transformations to perform on the model. Currently the only available transformation is the streaming transform Example 2: CNN:
--streaming-transform <STREAMING_AXIS>... Axes on which to perform the streaming transform in the NNIR graph There should be one axis per model input, as separate arguments If unspecified, no streaming transform is performed Example: --streaming-transform 0 1 for a two-input model with input streaming axes 0 and 1 -
The input shapes of the model. This is required if the ONNX model has dynamic input shapes. Vollo requires that the shapes of the inputs be known at compile-time:
--override-input-shapes <SHAPE>... If the model has dynamic input shapes, the user must pass fixed input shapes Separate each dimension with a ',' and pass each model input as a separate argument Example: --override-input-shapes 10,100,250 20,40 for a two-input model with input shapes (10, 100, 250) and (20, 40) -
Whether to elide all compute logic and generate a program with only IO logic. This is useful for determining IO latencies.
--io-only Generate a program with IO only - useful for testing IO latencies -
Whether to disable certain optimizations in the compiler which increase compilation time.
--disable-optimizations Disables some compiler optimizations. This can improve compilation time
Simplifying ONNX Models
vollo-onnx has a limited list of supported ONNX nodes. Often ONNX models can be over-complicated, and contain unnecessary shaping operations. It is recommended that onnx-simplifier be used before calling vollo-onnx on an ONNX model to remove these unnecessary shaping operations which aren't supported by vollo-onnx:
onnx-sim <model.onnx> <model-sim.onnx> --overwrite-input-shape <model-input-shape>
It is also recommended to use the --overwrite-input-shape with onnx-simplifier, as this can enable further simplifications and better constant folding.
Using ONNX from Python
ONNX models can also be imported and translated to NNIR models directly in python using the static NNIR method from_onnx. This also requires that the input shapes be specified if the ONNX model has dynamic input shapes, otherwise it can be None.
onnx_nnir = vollo_compiler.NNIR.from_onnx(onnx_path, input_shapes)
Supported Nodes
Tensors are expected to be in float32 format, unless they are used as indices / axes (in which case they should be int64s).
vollo-onnx supports models with the following nodes:
| Operator | Support Notes |
|---|---|
| Pointwise arithmetic ops | Add, Sub, Mul, Div |
| Inequality | >, <, >=, <= (when followed by a Where) |
Max and Min | |
Neg | |
| Clamp ops | Clip, Relu |
| Matrix multiplication | MatMul / Gemm where one input is a constant |
Conv | 1d with left-padding such that input and output seq dimensions match, groups == 1 or groups == in_channels == out_channels |
LSTM | LSTM without explicit hidden or cell state initialisation |
Gather | With a 0d/1d tensor of indices |
Slice | step size 1 with constant starts, ends and axes. |
ReduceSum, ReduceMean | With constant axes, keepdims = 1 required on data dimension |
Where | If the Where condition is an inequality comparison |
Concat | |
Transpose | See [data dimension][data-dimension.md) |
Softmax | |
LayerNormalization | With axis = -1. Supported in onnx opset versions >= 17 |
BatchNormalization | Where input scale, bias, mean and var are constants |
Squeeze, Unsqueeze | |
Reciprocal | |
Identity | |
Sqrt | |
Tanh | |
Exp | |
Softplus | |
Sigmoid | |
Expand | |
Reshape | The stride of the data dimension must be unchanged |
Benchmarks
This section provides benchmarks for the Vollo accelerator for a variety of models.
Performance figures are given for the following configurations of the Vollo accelerator:
- a 6 core, block size 32 configuration which is provided for the V80 accelerator card
- a 3 core, block size 64 configuration which is provided for the IA-840F accelerator card
- a 6 core, block size 32 configuration which is provided for the IA-420F accelerator card
If you require a different configuration, please contact us at vollo@myrtle.ai.
All these performance numbers can be measured using the vollo-sdk with the correct accelerator card
by running the provided benchmark script.
We also provide performance figures for a PCIe roundtrip for various input and output sizes.
Multilayer perceptron (MLP)
The model below is a simple multilayer perceptron (MLP) with 3 layers.
class MLP(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.fc3 = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = nn.functional.relu(self.fc1(x))
x = nn.functional.relu(self.fc2(x))
return self.fc3(x)
mlp = MLP(256.0, 384.0, 128.0)
We demonstrate the model at a variety of batch sizes. The model has 295K parameters.
V80: 6 cores, block size 32
| Model | Batch size | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|
| mlp_b1 | 1 | 1.5 | 1.8 |
| mlp_b4 | 4 | 1.9 | 2.2 |
| mlp_b8 | 8 | 2.7 | 2.9 |
IA-840F: 3 cores, block size 64
| Model | Batch size | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|
| mlp_b1 | 1 | 1.8 | 1.9 |
| mlp_b4 | 4 | 2.4 | 2.5 |
| mlp_b8 | 8 | 3.4 | 3.6 |
IA-420F: 6 core, block size 32
| Model | Batch size | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|
| mlp_b1 | 1 | 1.8 | 2.0 |
| mlp_b4 | 4 | 2.8 | 2.9 |
| mlp_b8 | 8 | 4.1 | 4.3 |
1D Convolutional neural networks (CNN)
We benchmark a simple 1-D convolutional model with a residual connection after every layer.
class ConvBlock(nn.Module):
def __init__(self, channels, kernel_size):
super().__init__()
self.conv = vollo_torch.nn.PaddedConv1d(channels, channels, kernel_size)
def forward(self, inp):
x = self.conv(inp)
return nn.functional.relu(x) + inp
class CNN(nn.Module):
def __init__(self, num_layers, kernel_size, channels):
super().__init__()
assert num_layers >= 1
self.cnn = nn.Sequential(
*[ConvBlock(channels, kernel_size) for i in range(num_layers)],
)
def forward(self, x):
x = self.cnn(x) # N x channels x T
return x
The kernel size for all models is 8. The batch size and sequence length are both set to 1 (i.e., we benchmark a single timestep). Consecutive inferences are run with spacing between them to minimise latency.
V80: 6 cores, block size 32
| Model | Layers | Channels | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| cnn_tiny | 3 | 128 | 393K | 1.5 | 1.8 |
| cnn_small | 3 | 256 | 1.6M | 1.8 | 2.0 |
| cnn_med | 6 | 256 | 3.1M | 2.4 | 2.7 |
IA-840F: 3 cores, block size 64
| Model | Layers | Channels | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| cnn_tiny | 3 | 128 | 393K | 1.7 | 1.8 |
| cnn_small | 3 | 256 | 1.6M | 1.9 | 2.0 |
| cnn_med | 6 | 256 | 3.1M | 2.5 | 2.5 |
IA-420F: 6 cores, block size 32
| Model | Layers | Channels | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| cnn_tiny | 3 | 128 | 393K | 1.7 | 1.9 |
| cnn_small | 3 | 256 | 1.6M | 2.0 | 2.1 |
| cnn_med | 6 | 256 | 3.1M | 2.8 | 2.9 |
Long Short Term Memory (LSTM) networks
We benchmark an LSTM model consisting of a stack of LSTMs followed by a linear layer.
class LSTM(nn.Module):
def __init__(self, num_layers, input_size, hidden_size, output_size):
super().__init__()
assert num_layers >= 1
self.lstm = vollo_torch.nn.LSTM(
input_size, hidden_size, num_layers=num_layers
)
self.fc = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = self.lstm(x)
x = self.fc(x)
return x
For all the benchmarked models, the input size is the same as the hidden size for all models and the output size is set to 32. The layers refers to the number of LSTM layers in the stack. The batch size and sequence length are both set to 1 (i.e., we benchmark a single timestep). Consecutive inferences are run with spacing between them to minimise latency.
We have also had LSTM models benchmarked and audited as part of a STAC-ML submission where we held the lowest latency across all models. Please refer to our STAC-ML submissions for more details:
Note that Vollo's current performance, as shown in the tables below, is significantly improved over the STAC-ML submissions.
V80: 6 core, block size 32
| Model | Layers | Hidden size | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| lstm_tiny | 2 | 128 | 268K | 1.4 | 1.4 |
| lstm_small | 3 | 256 | 1.6M | 2.0 | 2.0 |
| lstm_med | 3 | 480 | 5.6M | 3.2 | 3.2 |
| lstm_med_deep | 6 | 320 | 4.9M | 3.3 | 3.4 |
| lstm_large | 3 | 960 | 22.2M | 7.3 | 7.4 |
IA-840F: 3 core, block size 64
| Model | Layers | Hidden size | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| lstm_tiny | 2 | 128 | 268K | 1.7 | 1.8 |
| lstm_small | 3 | 256 | 1.6M | 2.1 | 2.2 |
| lstm_med | 3 | 480 | 5.6M | 2.7 | 2.9 |
| lstm_med_deep | 6 | 320 | 4.9M | 3.1 | 3.2 |
The large model is not supported on the IA-840F accelerator card as it is too large to fit in the accelerator memory.
IA-420F: 6 core, block size 32
| Model | Layers | Hidden size | Parameters | Mean latency (us) | 99th percentile latency (us) |
|---|---|---|---|---|---|
| lstm_tiny | 2 | 128 | 268K | 1.7 | 1.8 |
| lstm_small | 3 | 256 | 1.6M | 2.3 | 2.4 |
The medium and large models are not supported on the IA-420F accelerator card as they are too large to fit in the accelerator memory.
IO Round Trip
The following IO round trip times are sampled by using a program with no compute on the Vollo accelerator from the Vollo runtime.
More specifically this Vollo accelerator program waits for the last input byte to arrive before it sends the first output byte back. This method takes into account some of the overheads (such as copying to the DMA buffer in the Vollo runtime) associated with IO and this test is set up to see how it scales with difference sizes of inputs and outputs.
The following tables shows the round trip times in μs on the V80 board (similar times
were observed on other boards), for different input and output sizes. Using fewer than
64 bytes gives the same times as 64 bytes.
To reproduce these values on your own hardware run the provided benchmark
script with environment variable RUN_IO_TEST=1.
User buffers
This includes copying data to/from DMA buffers.
mean:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 1.47 | 1.49 | 1.54 | 1.55 | 1.61 | 1.69 | 1.93 | 2.15 | 2.77 |
| 128 B | 1.54 | 1.54 | 1.59 | 1.65 | 1.74 | 1.75 | 1.93 | 2.28 | 2.90 |
| 256 B | 1.60 | 1.63 | 1.68 | 1.69 | 1.85 | 1.88 | 1.94 | 2.30 | 2.91 |
| 512 B | 1.70 | 1.74 | 1.76 | 1.87 | 1.93 | 1.93 | 2.06 | 2.32 | 2.96 |
| 1024 B | 1.71 | 1.85 | 1.80 | 1.87 | 1.93 | 1.93 | 2.08 | 2.42 | 3.01 |
| 2048 B | 1.84 | 1.92 | 1.93 | 1.93 | 1.93 | 2.01 | 2.17 | 2.45 | 3.10 |
| 4096 B | 2.01 | 2.05 | 2.09 | 2.13 | 2.20 | 2.31 | 2.39 | 2.68 | 3.38 |
| 8192 B | 2.51 | 2.53 | 2.58 | 2.58 | 2.62 | 2.66 | 2.90 | 3.20 | 3.88 |
| 16384 B | 3.45 | 3.44 | 3.51 | 3.55 | 3.67 | 3.72 | 3.81 | 3.89 | 4.83 |
p99:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 1.75 | 1.77 | 1.70 | 1.81 | 1.78 | 1.95 | 2.07 | 2.31 | 2.92 |
| 128 B | 1.71 | 1.79 | 1.90 | 1.91 | 1.97 | 2.05 | 2.13 | 2.52 | 3.11 |
| 256 B | 1.87 | 1.94 | 1.97 | 1.99 | 2.00 | 2.08 | 2.15 | 2.54 | 3.09 |
| 512 B | 1.94 | 1.98 | 1.99 | 2.00 | 2.00 | 2.10 | 2.32 | 2.50 | 3.26 |
| 1024 B | 2.03 | 2.00 | 2.02 | 2.04 | 2.08 | 2.11 | 2.33 | 2.73 | 3.28 |
| 2048 B | 2.09 | 2.08 | 2.10 | 2.08 | 2.06 | 2.28 | 2.44 | 2.71 | 3.35 |
| 4096 B | 2.29 | 2.32 | 2.35 | 2.38 | 2.44 | 2.52 | 2.67 | 2.96 | 3.65 |
| 8192 B | 2.75 | 2.92 | 2.77 | 2.79 | 3.10 | 3.16 | 3.08 | 3.64 | 4.13 |
| 16384 B | 3.83 | 3.83 | 3.87 | 3.91 | 3.92 | 4.04 | 4.15 | 4.20 | 5.35 |
Raw DMA buffers
This is using buffers allocated with vollo_rt_get_raw_buffer which lets the runtime skip IO copy.
mean:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 1.45 | 1.48 | 1.54 | 1.54 | 1.59 | 1.66 | 1.93 | 2.15 | 2.76 |
| 128 B | 1.47 | 1.49 | 1.54 | 1.54 | 1.59 | 1.66 | 1.93 | 2.15 | 2.76 |
| 256 B | 1.53 | 1.54 | 1.54 | 1.57 | 1.61 | 1.71 | 1.93 | 2.15 | 2.77 |
| 512 B | 1.54 | 1.56 | 1.61 | 1.64 | 1.66 | 1.75 | 1.93 | 2.21 | 2.83 |
| 1024 B | 1.59 | 1.61 | 1.65 | 1.66 | 1.72 | 1.78 | 1.93 | 2.22 | 2.90 |
| 2048 B | 1.66 | 1.66 | 1.72 | 1.74 | 1.78 | 1.93 | 2.01 | 2.32 | 2.91 |
| 4096 B | 1.88 | 1.93 | 1.93 | 1.93 | 1.93 | 2.00 | 2.15 | 2.45 | 3.09 |
| 8192 B | 2.08 | 2.12 | 2.15 | 2.15 | 2.21 | 2.26 | 2.42 | 2.77 | 3.35 |
| 16384 B | 2.65 | 2.69 | 2.71 | 2.77 | 2.77 | 2.91 | 3.00 | 3.33 | 3.92 |
p99:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 1.73 | 1.75 | 1.74 | 1.67 | 1.85 | 1.83 | 2.10 | 2.38 | 2.98 |
| 128 B | 1.74 | 1.75 | 1.71 | 1.67 | 1.85 | 1.89 | 2.10 | 2.37 | 2.97 |
| 256 B | 1.78 | 1.77 | 1.64 | 1.84 | 1.76 | 1.99 | 2.06 | 2.38 | 2.94 |
| 512 B | 1.61 | 1.84 | 1.80 | 1.91 | 1.75 | 2.02 | 2.02 | 2.44 | 3.10 |
| 1024 B | 1.85 | 1.82 | 1.88 | 1.77 | 1.97 | 2.04 | 1.99 | 2.60 | 3.11 |
| 2048 B | 1.74 | 1.94 | 1.94 | 2.02 | 2.05 | 2.07 | 2.28 | 2.54 | 3.01 |
| 4096 B | 2.09 | 2.08 | 2.05 | 2.04 | 2.00 | 2.28 | 2.34 | 2.71 | 3.35 |
| 8192 B | 2.29 | 2.40 | 2.33 | 2.34 | 2.46 | 2.42 | 2.55 | 2.92 | 3.63 |
| 16384 B | 2.90 | 2.96 | 2.92 | 2.95 | 2.92 | 3.10 | 3.28 | 3.50 | 4.20 |
MMIO
This is skipping DMA for the input (raw DMA buffers are used for the output).
It is configured via the VOLLO_MMIO_MAX_SIZE environment variable.
mean:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 0.89 | 0.89 | 0.88 | 0.91 | 0.97 | 1.09 | 1.35 | 1.85 | 2.88 |
| 128 B | 0.89 | 0.90 | 0.89 | 0.91 | 0.98 | 1.11 | 1.36 | 1.87 | 2.89 |
| 256 B | 0.91 | 0.92 | 0.91 | 0.94 | 1.01 | 1.13 | 1.39 | 1.89 | 2.91 |
| 512 B | 0.98 | 0.97 | 0.98 | 0.99 | 1.06 | 1.19 | 1.44 | 1.94 | 2.97 |
| 1024 B | 1.00 | 1.01 | 1.00 | 1.03 | 1.09 | 1.22 | 1.48 | 1.98 | 3.00 |
| 2048 B | 1.07 | 1.08 | 1.09 | 1.10 | 1.17 | 1.29 | 1.55 | 2.05 | 3.07 |
| 4096 B | 1.22 | 1.22 | 1.23 | 1.24 | 1.31 | 1.43 | 1.68 | 2.19 | 3.22 |
| 8192 B | 1.49 | 1.50 | 1.50 | 1.52 | 1.58 | 1.72 | 1.97 | 2.49 | 3.51 |
| 16384 B | 2.07 | 2.07 | 2.08 | 2.10 | 2.17 | 2.29 | 2.55 | 3.06 | 4.09 |
p99:
| out\in | 64 B | 128 B | 256 B | 512 B | 1024 B | 2048 B | 4096 B | 8192 B | 16384 B |
|---|---|---|---|---|---|---|---|---|---|
| 64 B | 0.91 | 0.90 | 0.90 | 0.92 | 0.98 | 1.10 | 1.37 | 1.86 | 2.90 |
| 128 B | 0.91 | 0.91 | 0.91 | 0.93 | 0.99 | 1.11 | 1.37 | 1.88 | 2.91 |
| 256 B | 0.93 | 0.93 | 0.93 | 0.95 | 1.02 | 1.14 | 1.40 | 1.90 | 2.93 |
| 512 B | 1.00 | 0.99 | 0.99 | 1.01 | 1.07 | 1.20 | 1.46 | 1.96 | 2.98 |
| 1024 B | 1.02 | 1.02 | 1.02 | 1.04 | 1.10 | 1.23 | 1.49 | 1.99 | 3.02 |
| 2048 B | 1.09 | 1.09 | 1.11 | 1.12 | 1.18 | 1.31 | 1.56 | 2.06 | 3.10 |
| 4096 B | 1.24 | 1.24 | 1.25 | 1.25 | 1.32 | 1.44 | 1.70 | 2.21 | 3.24 |
| 8192 B | 1.51 | 1.51 | 1.51 | 1.53 | 1.60 | 1.73 | 1.98 | 2.50 | 3.53 |
| 16384 B | 2.09 | 2.09 | 2.09 | 2.11 | 2.18 | 2.31 | 2.56 | 3.08 | 4.11 |
Setting up the Vollo accelerator
This section describes how to program your accelerator card with the Vollo Accelerator upon first use and how to reprogram your accelerator card with updated versions of the Vollo Accelerator. It also describes how to obtain a Vollo license which you will need to use the Vollo accelerator.
Environment Variable Setup
The initial setup instructions should be run in the Vollo SDK directory.
cd vollo-sdk-<VERSION>
When using Vollo, you should also have the setup.sh script sourced in bash
to set up environment variables used by Vollo:
source setup.sh
System Requirements
CPU Requirements
An x86-64 CPU is required to run the Vollo runtime.
Accelerator Card Requirements
The SDK runs on a server CPU with PCIe FPGA accelerator cards. It currently supports the following accelerator cards:
| Accelerator Card | FPGA | Max parameter count |
|---|---|---|
| BittWare IA-420f | Intel Agilex AGF014 | 3.1 Million |
| BittWare IA-840f | Intel Agilex AGF027 | 8.4 Million |
| Napatech NT400D11 | Intel Agilex AGF014 | 3.1 Million |
| AMD Alveo V80 | AMD Versal XCV80 | 25.2 Million1 |
Operating System Requirements
Vollo is compatible with Ubuntu 20.04 and later.
50.3 Million if using FP8 weights.
Programming the Agilex FPGA
This section assumes that the Vollo SDK is already installed and setup on the machine that you are using. If you haven't done so already, instructions for how to do that may be found at: Vollo SDK Installation.
Make sure the VOLLO_SDK environment variable is set by sourcing setup.sh from the Vollo SDK.
source <path-to-VOLLO_SDK>/setup.sh
Download the bitstream for your FPGA
The bitstream is available on the Github Release page alongside the Vollo SDK.
For example to download the bitstream for the Agilex ia840f board with the c2b64d configuration of Vollo:
curl -LO https://github.com/MyrtleSoftware/vollo-sdk/releases/download/v28.1.1/vollo-bittware-ia840f-c2b64d-28.1.tar.gz
mkdir -p $VOLLO_SDK/bitstream
tar -xzf vollo-bittware-ia840f-c2b64d-28.1.tar.gz -C $VOLLO_SDK/bitstream
The Agilex-based boards that are currently supported are:
-
Bittware IA420F
-
Bittware IA840F
-
Napatech NT400D11 (Link programmable version)
Note on programming the Napatech NT400D11 over JTAG
The NT400D11 card needs additional cabling beyond a USB cable to program the board over JTAG. This cabling is provided as a development kit by Napatech (PGM-DEVKIT-IFPGA-DF52-2XIDC-UART, product number: 802-0116-01-10) and includes:
-
An Intel® FPGA USB-Blaster II cable and,
-
A Napatech Passive FPGA Download Cable converter box
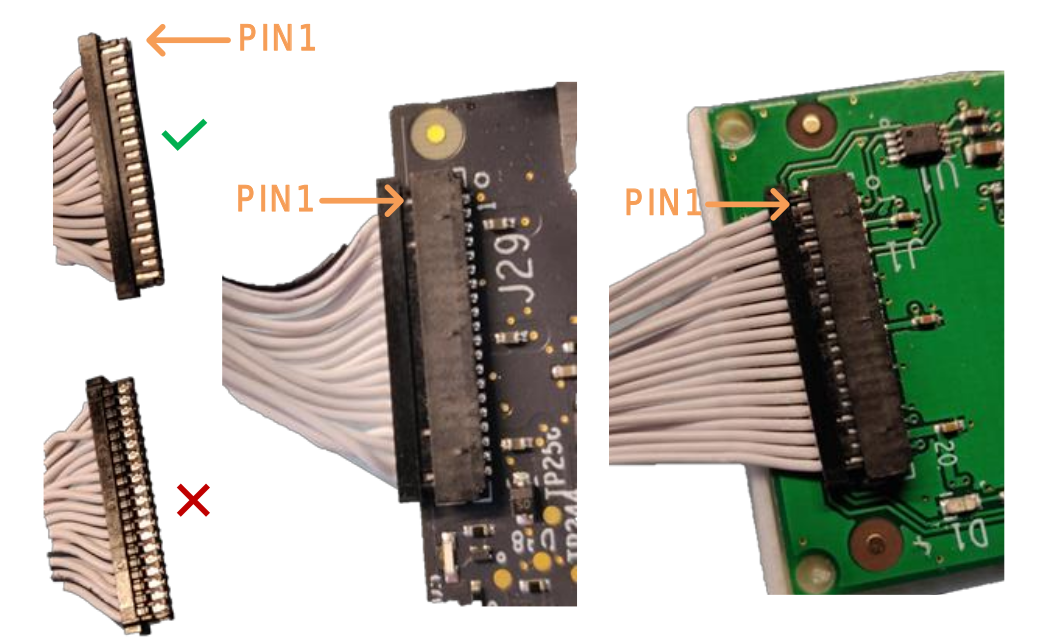
These two cables must be connected to each other as shown in the image below:

To connect this cable array to the Napatech board, the long thin plug should be connected to the connector shown in the following image:

In order to correctly couple these two connectors, observe the conventions shown in the following image:
Connector the USB side of the cable array to a high-speed USB port on your host PC and the follow the rest of the directions in the next section.
Programming the FPGA via JTAG
If your FPGA is not already programmed with the Vollo accelerator then please follow these instructions to load the bitstream into the accelerator card's flash memory.
This requires a USB cable to be connected to the accelerator card and Quartus programmer to be installed on the system so that the device can be programmed over JTAG.
If the FPGA card already has a Vollo Accelerator Bitstream, it can be updated over PCIe by following the steps in the section Program the FPGA via PCIe below. Note that you only need to update the bitstream if updating to an incompatible version of the Vollo SDK. Programming over PCIe is faster than programming over JTAG, and does not require a USB programming cable or for Quartus Programmer to be installed.
-
Download and install the latest Quartus Programmer:
- Navigate to https://www.intel.com/content/www/us/en/software-kit/782411/intel-quartus-prime-pro-edition-design-software-version-23-2-for-linux.html.
- Select
Additional Softwareand scroll down to find the Programmer. - Follow the instructions for installation.
-
Add Quartus programmer to your path:
export QUARTUS_DIR=<path to qprogrammer install> export PATH=$QUARTUS_DIR/qprogrammer/quartus/bin:$PATH -
Start the jtag daemon:
sudo killall jtagd sudo jtagd -
Run
jtagconfigfrom the Quartus install, you should see the device(s):$ jtagconfig 1) IA-840F [1-5.2] 0341B0DD AGFB027R25A(.|R0)or, for the NT400D11:
$ jtagconfig 1) USB-BlasterII [1-5] C34320DD AGFA014R24C(.|B|AA) -
Navigate to the directory containing the
jicfile:cd $VOLLO_SDK/bitstream -
Set the JTAG clock frequency of the device you want to program to 16 MHz. Specify the device by providing the name returned by
jtagconfig:jtagconfig --setparam "IA-840F [1-5.2]" JtagClock 16Mor, for the NT400D11:
jtagconfig --setparam "USB-BlasterII [1-5]" JtagClock 16M -
Start the programming operation on the chosen device. This takes around 20 minutes. For the IA840F:
quartus_pgm -c "IA-840F [1-5.2]" -m JTAG -o "ipv;vollo-bittware-ia840f-c3b64.jic"or, for the IA420F:
quartus_pgm -c "IA-420F [1-5.2]" -m JTAG -o "ipv;vollo-bittware-ia420f-c6b32.jic"or, for the NT400D11:
quartus_pgm -c "USB-BlasterII [1-5]" -m JTAG -o "ipv;vollo-napatech-nt400d11-c6b32.jic" -
Go back to 6 and program any other devices.
-
Power off the system and start it back up. The bitstream will now be loaded onto the FPGA.
For the configuration process to be triggered the board has to register the power being off. It is recommended to turn the power off and then wait a few seconds before turning the power back on to ensure this happens. -
Check a Vollo bitstream is loaded:
$ lspci -d 1ed9:766f 51:00.0 Processing accelerators: Myrtle.ai Device 766f (rev 01)Check the correct Vollo bitstream is loaded:
vollo-tool bitstream-check bitstream/<bitstream-name>.json
Programming the FPGA via PCIe
NOTE: this can only be done with an FPGA that is already programmed with a Vollo bitstream.
-
Load the kernel driver:
sudo ./load-kernel-driver.sh -
Check the current bitstream information:
source setup.sh vollo-tool bitstream-info -
Check that the device is set up for remote system updates by running the command below, with
device indexrepresenting the index of the device you want to update, in the order shown in the previous command, starting from 0. It should print ajsonstring to the terminal showing the device status.vollo-tool fpga-config rsu-status <device index> -
Update the
USER_IMAGEpartition of the flash with the new bitstream image contained in therpdarchive in the$VOLLO_SDK/bitstreamdirectory. This should take around 5 minutes. Do not interrupt this process until it completes.sudo ./load-kernel-driver.sh vollo-tool fpga-config overwrite-partition <device index> <.rpd.tar.gz file> USER_IMAGE -
Repeat step 4 for any other devices you wish to update.
-
Power off the system and start it back up.
For the configuration process to be triggered the board has to register the power being off. It is recommended to turn the power off and then wait a few seconds before turning the power back on to ensure this happens. -
Repeat steps 1, 2 and 3. The
bitstream-infocommand should show that the updated bitstream has been loaded (e.g. a newer release date), and the output of thersu-statuscommand should show all zeroes for theerror_codeandfailing_image_addressfields. -
Check the correct Vollo bitstream is loaded:
sudo ./load-kernel-driver.sh vollo-tool bitstream-check bitstream/<bitstream-name>.json
Programming the Artena FPGA
This section assumes that the Vollo SDK is already installed and setup on the machine that you are using. If you haven't done so already, instructions for how to do that may be found at: Vollo SDK Installation
Make sure the VOLLO_SDK environment variable is set by sourcing setup.sh from the Vollo SDK.
source <path-to-VOLLO_SDK>/setup.sh
Download the bitstream for your FPGA
The bitstream is available on the Github Release page alongside the Vollo SDK. For example to
download the bitstream for the Silicom Artena board with the c8b32 configuration of Vollo:
curl -LO https://github.com/MyrtleSoftware/vollo-sdk/releases/download/v28.1.1/vollo-silicom-artena-c8b32-28.1.tar.gz
mkdir -p $VOLLO_SDK/bitstream
tar -xzf vollo-silicom-artena-c8b32-28.1.tar.gz -C $VOLLO_SDK/bitstream
An LSTM-only image is available for the Artena which runs at a slightly higher clock frequency than the full-featured-Vollo c8b32 version. This may be downloaded as follows:
curl -LO https://github.com/MyrtleSoftware/vollo-sdk/releases/download/v28.1.1/vollo-silicom-artena-c8b32lstm-28.1.tar.gz
mkdir -p $VOLLO_SDK/bitstream
tar -xzf vollo-silicom-artena-c8b32lstm-28.1.tar.gz -C $VOLLO_SDK/bitstream
Programming the FPGA via JTAG
Programming an Artena board over JTAG is necessary if the board does not yet have a Vollo image loaded on it or if the device does not enumerate correctly. Programming over PCIe is preferred. If the board does not enumerate or there is some other issue with PCIe programming then JTAG programming is the only option.
This requires a USB cable to be connected to the accelerator card and Vivado to be installed on the system so that the device can be programmed over JTAG.
-
Download and install Vivado Lab Edition:
-
Navigate to the Vivado Design Tools download page.
-
Under "Vivado Lab Solutions" find "Vivado 2025.2: Lab Edition - Linux (TAR/GZIP - 1.99 GB)" (later versions may be available).
-
Download the file and extract it to a directory of your choice. You will need an AMD account to download the file. You can create an account for free.
-
Pick a location to install
Vivado_Lab, e.g./opt/Xilinx, a user directory like~/Xilinxis also fine:VIVADO_DIR=~/Xilinx mkdir -p $VIVADO_DIR -
Extract the tarball:
tar xf Vivado_Lab_Lin_2025.2_1114_2157.tar cd Vivado_Lab_Lin_2025.2_1114_2157 -
Run the installer:
./xsetup --agree 3rdPartyEULA,XilinxEULA --batch Install --edition "Vivado Lab Edition (Standalone)" --location $VIVADO_DIR -
Check that installation was successful:
$ $VIVADO_DIR/2025.2/Vivado_Lab//bin/vivado_lab -version Vivado Lab Edition v2025.2 (64-bit) SW Build 6299465 on Fri Nov 14 21:19:43 MST 2025 Tool Version Limit: 2025.11 Copyright 1986-2022 Xilinx, Inc. All Rights Reserved. Copyright 2022-2025 Advanced Micro Devices, Inc. All Rights Reserved.
-
-
Run the
flash_vollo-silicom-artena-c8b32.tclscript to program the Artena board:sudo $VIVADO_DIR/2025.2/Vivado_Lab/bin/vivado_lab -mode batch -source ./flash_vollo-silicom-artena-c8b32.tclThis prints out a lot of lines while programming and takes about 10 minutes.
If you get an error like this:
ERROR: [Labtoolstcl 44-469] There is no current hw_target.Make sure that you ran
vivado_labwithsudoand that the USB cable is plugged in.After programming you must power cycle the host for the new bitstream to be loaded.
-
If successful the device should now enumerate as a Myrtle.ai Vollo device:
$ lspci -d 1ed9: 01:00.0 Processing accelerators: Myrtle.ai Device 000a 01:00.1 Processing accelerators: Myrtle.ai Device 100a
Programming the FPGA over PCIe
If your FPGA is already programmed with the Vollo accelerator then you can update the bitstream over PCIe. You can check if the device is programmed with the Myrtle.ai Vollo bitstream by running:
$ lspci -d 1ed9:
01:00.0 Processing accelerators: Myrtle.ai Device 000a
01:00.1 Processing accelerators: Myrtle.ai Device 100a
If the device has not been programmed with the vollo bitstream then you will need to program the board over JTAG. See Programming the FPGA via JTAG.
The following instructions will program the Vollo bitstream over PCIe:
-
First load the kernel driver.
sudo ./load-kernel-driver.sh vfio -
Once the kernel driver is loaded you can program the flash with
vollo-tool:sudo $VOLLO_SDK/bin/vollo-tool fpga-config overwrite-partition ${device_index:?} $VOLLO_SDK/bitstream/vollo-silicom-artena-c8b32.pdi USER_IMAGEThe progress will be displayed and it should take a couple of minutes to program the flash. You will need to power cycle the host for the new bitstream to be loaded.
-
If successful the device should now enumerate as a Myrtle.ai Vollo device:
$ lspci -d 1ed9: 01:00.0 Processing accelerators: Myrtle.ai Device 000a 01:00.1 Processing accelerators: Myrtle.ai Device 100a
Programming the V80 FPGA
This section assumes that the Vollo SDK is already installed and set up on the machine that you are using. If you haven't done so already, instructions for how to do that may be found at: Vollo SDK Installation
Make sure the VOLLO_SDK environment variable is set by sourcing setup.sh from the Vollo SDK.
source <path-to-VOLLO_SDK>/setup.sh
Download the bitstream for your FPGA
The bitstream is available on the Github Release page alongside the Vollo SDK. For example to
download the bitstream for the AMD V80 board with the c6b32 configuration of Vollo:
curl -LO https://github.com/MyrtleSoftware/vollo-sdk/releases/download/v28.1.1/vollo-amd-v80-c6b32-28.1.tar.gz
mkdir -p $VOLLO_SDK/bitstream
tar -xzf vollo-amd-v80-c6b32-28.1.tar.gz -C $VOLLO_SDK/bitstream
Alternatively, for the AMD V80LL, use:
curl -LO https://github.com/MyrtleSoftware/vollo-sdk/releases/download/v28.1.1/vollo-amd-v80ll-c6b32-28.1.tar.gz
mkdir -p $VOLLO_SDK/bitstream
tar -xzf vollo-amd-v80ll-c6b32-28.1.tar.gz -C $VOLLO_SDK/bitstream
Programming the FPGA via JTAG
Programming a V80 board over JTAG is necessary if the board does not yet have a Vollo image loaded on it or if the device does not enumerate correctly. Programming over PCIe is preferred. If the board does not enumerate or there is some other issue with PCIe programming then JTAG programming is the only option.
This requires a USB cable to be connected to the accelerator card and Vivado to be installed on the system so that the device can be programmed over JTAG.
-
Download and install Vivado Lab Edition:
-
Navigate to the Vivado Design Tools download page.
-
Under "Vivado Lab Solutions" find "Vivado 2025.2: Lab Edition - Linux (TAR/GZIP - 1.99 GB)" (later versions may be available).
-
Download the file and extract it to a directory of your choice. You will need an AMD account to download the file. You can create an account for free.
-
Pick a location to install
Vivado_Lab, e.g./opt/Xilinx, a user directory like~/Xilinxis also fine:VIVADO_DIR=~/Xilinx mkdir -p $VIVADO_DIR -
Extract the tarball:
tar xf Vivado_Lab_Lin_2025.2_1114_2157.tar cd Vivado_Lab_Lin_2025.2_1114_2157 -
Run the installer:
./xsetup --agree 3rdPartyEULA,XilinxEULA --batch Install --edition "Vivado Lab Edition (Standalone)" --location $VIVADO_DIR -
Check that installation was successful:
$ $VIVADO_DIR/2025.2/Vivado_Lab//bin/vivado_lab -version Vivado Lab Edition v2025.2 (64-bit) SW Build 6299465 on Fri Nov 14 21:19:43 MST 2025 Tool Version Limit: 2025.11 Copyright 1986-2022 Xilinx, Inc. All Rights Reserved. Copyright 2022-2025 Advanced Micro Devices, Inc. All Rights Reserved.
-
-
Run the
flash_vollo-amd-v80-c6b32.tclscript to program the V80 board:sudo $VIVADO_DIR/2025.2/Vivado_Lab/bin/vivado_lab -mode batch -source ./flash_vollo-amd-v80-c6b32.tclThis prints out a lot of lines while programming and takes about 10 minutes.
If you get an error like this:
ERROR: [Labtoolstcl 44-469] There is no current hw_target.Make sure that you ran
vivado_labwithsudoand that the USB cable is plugged in.After programming you must power cycle the host for the new bitstream to be loaded.
Sometimes a V80 host machine will hang on boot. You may need to force another power cycle of the host to bring it back. Occasionally a power cycle isn't enough and you may need to turn the power off for several minutes before turning it back on. -
If successful the device should now enumerate as a Myrtle.ai Vollo device:
$ lspci -d 1ed9: 01:00.0 Processing accelerators: Myrtle.ai Device 000a 01:00.1 Processing accelerators: Myrtle.ai Device 100a
Programming the FPGA over PCIe
If your FPGA is already programmed with the Vollo accelerator then you can update the bitstream over PCIe. You can check if the device is programmed with the Myrtle.ai Vollo bitstream by running:
$ lspci -d 1ed9:
01:00.0 Processing accelerators: Myrtle.ai Device 000a
01:00.1 Processing accelerators: Myrtle.ai Device 100a
If the device has not been programmed with the Vollo bitstream then you will need to program the board over JTAG. See Programming the FPGA via JTAG.
Programming over PCIe is the preferred method of programming the board as it is faster than programming over JTAG, and does not require a USB programming cable or for Vivado to be installed.
-
Build and insert the ami driver.
cd ami_kernel_driver make sudo insmod ami.koThere may be compilation issues with your version of Linux. This has been checked with Rocky Linux 8.10 and Ubuntu 22.04. If there is an issue with your system, please contact us.
-
Once the kernel driver is loaded you can program the flash with
vollo-tool(which usesami_tool). If you only have one board,device_indexis0.sudo $VOLLO_SDK/bin/vollo-tool fpga-config overwrite-partition ${device_index:?} $VOLLO_SDK/bitstream/vollo-amd-v80-c6b32.pdi USER_IMAGEThere will be a progress bar and it should take around 5 minutes to program the flash. You will need to power cycle the host for the new bitstream to be loaded.
Sometimes a V80 host machine will hang on boot. You may need to force another power cycle of the host to bring it back. Occasionally a power cycle isn't enough and you may need to turn the power off for several minutes before turning it back on. -
If successful the device should now enumerate as a Myrtle.ai Vollo device:
$ lspci -d 1ed9: 01:00.0 Processing accelerators: Myrtle.ai Device 000a 01:00.1 Processing accelerators: Myrtle.ai Device 100a
Troubleshooting
Some troubleshooting recommendations may be found in Troubleshooting the V80
Troubleshooting the V80 / V80LL card
This section provides suggested solutions to common problems that are faced when working with the V80 or V80LL. Though only the V80 is referenced in the solutions below, they all apply to both the V80 and V80LL cards.
General troubleshooting
Before trying any other solutions, it's always good practice to power down the host machine and then power it back up again. This can solve configuration issues related to PCIe enumeration and can solve many other problems.
Problems programming the V80 over PCIe
The processes below assume that the V80 has already been successfully programmed with a Vollo image at least once,
either via JTAG or PCIe. If you have not yet programmed the card with a Vollo image, please follow the instructions
in Programming the V80 via JTAG.
If you are having trouble while programming the V80 card over PCIe, or if you cannot access sensor data
from the card, then the first step is to ensure that the ami driver is built and loaded correctly.
cd $VOLLO_SDK/ami_kernel_driver
make
sudo insmod ami.ko
If the driver has already been loaded, try unloading and reloading the driver:
cd $VOLLO_SDK/ami_kernel_driver
sudo rmmod ami
sudo insmod ami.ko
Now that the ami driver is correctly loaded, the driver association with the v80 should be visible with an lspci command.
lspci -vvvnn -s $BDF
If you don't know what your card's BDF is, it may be found by running the command below.
lspci | grep "Myrtle"
Running the full lspci command should display the V80 card loaded with a Vollo image as below. The card's BDF here is 01:00.
01:00.0 Processing accelerators [1200]: Myrtle.ai Device [1ed9:000a]
Subsystem: Xilinx Corporation Device [10ee:50b4]
Control: I/O- Mem+ BusMaster- SpecCycle- MemWINV- VGASnoop- ParErr- Stepping- SERR- FastB2B- DisINTx-
Status: Cap+ 66MHz- UDF- FastB2B- ParErr- DEVSEL=fast >TAbort- <TAbort- <MAbort- >SERR- <PERR- INTx-
IOMMU group: 12
Region 0: Memory at c0000000 (32-bit, non-prefetchable) [size=256M]
Region 2: Memory at d0000000 (32-bit, non-prefetchable) [size=4M]
Region 4: Memory at fce0000000 (64-bit, prefetchable) [size=4M]
Capabilities: <access denied>
01:00.1 Processing accelerators [1200]: Myrtle.ai Device [1ed9:100a]
Subsystem: Xilinx Corporation Device [10ee:50b4]
Control: I/O- Mem+ BusMaster+ SpecCycle- MemWINV- VGASnoop- ParErr- Stepping- SERR- FastB2B- DisINTx-
Status: Cap+ 66MHz- UDF- FastB2B- ParErr- DEVSEL=fast >TAbort- <TAbort- <MAbort- >SERR- <PERR- INTx-
Latency: 0
IOMMU group: 13
Region 0: Memory at fcd0000000 (64-bit, prefetchable) [size=256M]
Capabilities: <access denied>
Kernel driver in use: ami
The last line shows the ami driver correctly associated with the 1st physical function of the board, 01:00.1.
This provides access to the OSPI programming functions available on the V80 via PCIe and the normal PCIe programming detailed in Programming the V80 over PCIe should be possible. If not, please continue with this guide.
Recovering the V80 from a "bad state"
The V80 card can sometimes enter into a "bad state". This can result in the card not functioning correctly despite following other troubleshooting steps, including powering down and powering up the host machine.
Such a failure might manifest as follows:
If, while running the PCIe programming commands found in step 2 of Programming the FPGA over PCIe, you see a failure that displays as below, then it's possible that the V80 card is in a bad state.
----------------------------------------------
Device | 01:00.1
----------------------------------------------
Current Configuration
----------------------------------------------
UUID | 611196598b26d6e6896b650e6357e1ba
----------------------------------------------
Incoming Configuration
----------------------------------------------
UUID | 611196598b26d6e6896b650e6357e1ba
Path | /home/stuart/Projects/defaultBuilds/v80ll-sensors-amc-update/pdi/amd_v80_gen5x8_nofpt.pdi
Partition | 0
----------------------------------------------
Are you sure you wish to proceed? [Y/n]: Y
[....................................................................................................] 0% | Error: could not program image
EIO: File could not be read or written [do_image_download:154 - errno 19 (No such device)].
The suggested solution for stateful failures like this is to:
- Power the host machine down
- Completely remove power from the host machine by either unplugging or removing the card from the host machine completely.
- Leave the host machine and/or V80 card unpowered for around 30 minutes.
- Reinsert the V80 into the host machine (if removed), reconnect power to the host machine.
- Power up the host machine again.
- Re-attempt PCIe programming following the steps provided in Programming the FPGA over PCIe.
This unorthodox solution has been found to work in many cases and is indeed the recommended solution to these problems as provided by AMD in their support forum.
Licensing
Vollo is licensed on a per-device basis.
Redeeming licenses with vollo-tool
You will receive a purchase-token with your Vollo purchase. The purchase-token can be used to redeem Vollo licenses for a set number of devices.
To see the number of credits (i.e. the number of devices which can be redeemed) on your purchase-token, run:
source setup.sh
vollo-tool license num-remaining-devices -t <purchase-token>
To redeem devices on your purchase token:
-
Load the kernel driver if you haven't already done so:
sudo ./load-kernel-driver.sh -
Run
vollo-tool device-ids. This will enumerate all Vollo accelerators and output their device IDs.vollo-tool device-ids | tee vollo.devices -
Run
vollo-tool license redeem-device, passing the device IDs you wish to generate licenses for. This will print a breakdown of which devices will consume credits on thepurchase-token.vollo-tool license redeem-device -t <purchase-token> --device-ids <device IDs>Alternatively you can pass the
vollo.devicesoutput from the previous step if you wish to redeem licenses for all devices.vollo-tool license redeem-device -t <purchase-token> --device-id-file <device ID file> -
When you have confirmed which devices will consume credits on the
purchase-token, runvollo-tool license redeem-device --consume-creditsto generate the licenses. The licenses will be printed tostdout.vollo-tool license redeem-device -t <purchase-token> --device-ids <device IDs> --consume-credits | tee vollo.lic
The licenses redeemed on a purchase token can be viewed at any time by running vollo-tool license view-licenses:
vollo-tool license view-licenses -t <purchase-token> | tee vollo.lic
Installing a license
-
The license file location should be set in the environment variable
MYRTLE_LICENSE.export MYRTLE_LICENSE=<license file> -
Check that the license for your device(s) is being recognised.
vollo-tool license-checkIf successful, the output should look like this:
Ok: found 2 devices with valid licenses
Running an example
The Vollo SDK contains a trivial program for each accelerator to check if the accelerator is working.
-
Ensure you have run the setup steps:
cd <vollo-sdk> sudo ./load-kernel-driver.sh source setup.sh export MYRTLE_LICENSE=<your-license-file> -
Compile the C runtime example:
(cd example; make) -
Run the example.
For a block-size 64 accelerator such as
vollo-bittware-ia840f-c3b64orvollo-bittware-ia840f-c2b64d:./example/vollo-example example/identity_b64.volloFor a block-size 32 accelerator such as
vollo-bittware-ia420f-c6b32orvollo-v80-c6b32:./example/vollo-example example/identity_b32.volloYou should see an output similar to the following:
Using program: "example/identity_b64.vollo" Using vollo-rt version: 18.0.0 Using Vollo accelerator with 3 core(s) and block_size 64 Program metadata for model 0: 1 input with shape: [128] 1 output with shape: [128] Starting 10000 inferences Done Ran 10000 inferences in 0.020185 s with: mean latency of 2.004259 us 99% latency of 2.176000 us throughput of 495411.228723 inf/s
Running the benchmark
The release comes with a benchmark script that can be used to measure the performance of the accelerator for a variety of models. The script uses the vollo compiler to compile the models for your accelerator and then runs the models on the accelerator to measure the performance.
-
Install the script dependencies:
sudo apt install python3-venv jqNote, the compiler requires python 3.7 or later.
-
Ensure you have run the setup steps:
cd <vollo-sdk> sudo ./load-kernel-driver.sh source setup.sh export MYRTLE_LICENSE=<your-license-file> -
Run the benchmark:
$VOLLO_SDK/example/benchmark.sh -
You can cross reference your numbers with those in the benchmarks section of the documentation.
Vollo Runtime
The Vollo runtime provides a low latency asynchronous inference API for timing critical inference requests on the Vollo accelerator.
A couple of example C programs that use the Vollo runtime API have been included in the
installation in the example/ directory.
In order to use the Vollo runtime you need to have an accelerator set up:
- Programmed Intel Agilex, AMD V80 or Silicom Artena accelerator
- A loaded kernel driver and an installed license
- Environment set up with
source setup.sh
Python API
The Vollo SDK includes Python bindings for the Vollo runtime. These can be more convenient than the C API for e.g. testing Vollo against PyTorch models.
Here is the API for the Python bindings.
And a small example of using the Python bindings.
C API
Make sure the VOLLO_SDK environment variable is set by sourcing setup.sh from the Vollo SDK.
source <path-to-VOLLO_SDK>/setup.sh
The Vollo runtime API is a C API with simple types and functions in order to be straight forward to use from any language with a C FFI.
- Header file:
$VOLLO_SDK/include/vollo-rt.h - Dynamic library:
$VOLLO_SDK/lib/libvollo_rt.so - Static library:
$VOLLO_SDK/lib/libvollo_rt.a
It was built against GLIBC version 2.17.
To compile against Vollo RT with a standard C compiler, you can use the following flags:
-I $VOLLO_SDK/include -L $VOLLO_SDK/lib -lvollo_rt
These are the main steps (in order) a program using vollo_rt will follow:
- Initialise the Vollo runtime using
vollo_rt_init - Add Vollo accelerators to the runtime using
vollo_rt_add_accelerator(Note: the current release only supports one accelerator) - Load a Vollo program onto the Vollo accelerators with
vollo_rt_load_program - Optionally, inspect the metadata about the models in the program using API calls such as
vollo_rt_num_modelsandvollo_rt_model_num_inputs - Queue and run inference jobs by first calling
vollo_rt_add_job_bf16(orvollo_rt_add_job_fp32) and then polling in a loop for their completion usingvollo_rt_poll. You can queue several jobs before callingvollo_rt_pollor add extra jobs at any point. - Finally call
vollo_rt_destroyto release resources.
The API is designed to explicitly return errors when it can to let the user handle them as they see fit. The metadata functions will instead error out themselves if any of the documented pre-conditions they rely on aren't met. Any other crash is considered a bug and we would be very grateful if you could tell us about it.
Initialisation
A vollo context is created by calling vollo_rt_init.
Add an accelerator by using the vollo_rt_add_accelerator function.
/**
* Initialise the vollo-rt context. This must be called before any other vollo-rt functions.
*
* Logging level can be configured by setting the environment variable `VOLLO_RT_LOG` to one of:
* "error", "warn", "info", "debug", or "trace"
*/
vollo_rt_error_t vollo_rt_init(vollo_rt_context_t* context_ptr);
/**
* Destroy vollo-rt context, releasing its associated resources.
*/
void vollo_rt_destroy(vollo_rt_context_t vollo);
/**
* Add an accelerator.
* The accelerator is specified by its index. The index refers to an accelerator in the sorted list
* of PCI addresses. This should be called after `vollo_rt_init` but before `vollo_rt_load_program`
*/
vollo_rt_error_t vollo_rt_add_accelerator(vollo_rt_context_t vollo, size_t accelerator_index);
Loading a program
A program is loaded onto the Vollo accelerator using the vollo_rt_load_program function.
/**
* Load a program onto the Vollo accelerators.
* This should be called after `vollo_rt_add_accelerator`
*
* A Vollo program is generated by the Vollo compiler, it is typically named
* "<program_name>.vollo".
* The program is intended for a specific hardware config (number of accelerators,
* cores and other configuration options), this function will return an
* error if any accelerator configuration is incompatible with the program.
* Once loaded, the program provides inference for several models concurrently.
*
* Note: This should only be called once per `vollo_rt_context_t`, as such if
* a program needs to be changed or reset, first `vollo_rt_destroy` the current
* context, then start a new context with `vollo_rt_init`.
*/
vollo_rt_error_t vollo_rt_load_program(vollo_rt_context_t vollo, const char* program_path);
Model metadata
Once a program is loaded, it provides inference for one or more models. Metadata about
a model is obtained with vollo_rt_model_* functions.
Each model can have multiple distinct inputs and outputs. Each input and each output has a multi-dimensional shape associated with it. All of the metadata is defined by the program as supplied by the Vollo compiler. All the shapes are statically defined.
Some models can be compiled as streaming statefully over a dimension, that dimension is then erased from the inference shape but its possition can be recovered in the model metadata.
/**
* Inspect the number of models in the program loaded onto the vollo.
*
* Programs can contain multiple models, a `model_index` is used to select a
* specific model
*/
size_t vollo_rt_num_models(vollo_rt_context_t vollo);
/**
* Get the number of inputs of a model
*
* Each input has its own distinct shape
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
*/
size_t vollo_rt_model_num_inputs(vollo_rt_context_t vollo, size_t model_index);
/**
* Get the number of outputs of a model
*
* Each output has its own distinct shape
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
*/
size_t vollo_rt_model_num_outputs(vollo_rt_context_t vollo, size_t model_index);
/**
* Get the shape for input at a given index
*
* The return value is an array of dims containing the input shape
* Use `vollo_rt_model_input_shape_len` to get the number of axes in the shape.
*
* For backwards compatibility the array is also 0-terminated, but that should not be relied upon
* in order to correctly support shapes containing a 0 dimension
*
* The value lives for as long as the model
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `input_index < vollo_rt_model_num_inputs`
*/
const size_t* vollo_rt_model_input_shape(
vollo_rt_context_t vollo, size_t model_index, size_t input_index);
/**
* Get the number of axes in the shape for the input at a given index
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `input_index < vollo_rt_model_num_inputs`
*/
size_t vollo_rt_model_input_shape_len(
vollo_rt_context_t vollo, size_t model_index, size_t input_index);
/**
* Get the shape for output at a given index
*
* The return value is an array of dims containing the output shape
* Use `vollo_rt_model_output_shape_len` to get the number of axes in the shape.
*
* For backwards compatibility the array is also 0-terminated, but that should not be relied upon
* in order to correctly support shapes containing a 0 dimension
*
* The value lives for as long as the model
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `output_index < vollo_rt_model_num_outputs`
*/
const size_t* vollo_rt_model_output_shape(
vollo_rt_context_t vollo, size_t model_index, size_t output_index);
/**
* Get the number of axes in the shape for the output at a given index
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `output_index < vollo_rt_model_num_outputs`
*/
size_t vollo_rt_model_output_shape_len(
vollo_rt_context_t vollo, size_t model_index, size_t output_index);
/**
* Get the number of elements for input at a given index
*
* This is simply the product of the dimensions returned by `vollo_rt_model_input_shape`,
* it is provided to make it easier to allocate the correct number of elements.
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `input_index < vollo_rt_model_num_inputs`
*/
size_t vollo_rt_model_input_num_elements(
vollo_rt_context_t vollo, size_t model_index, size_t input_index);
/**
* Get the number of elements for output at a given index
*
* This is simply the product of the dimensions returned by `vollo_rt_model_output_shape`,
* it is provided to make it easier to allocate the correct number of elements.
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `output_index < vollo_rt_model_num_outputs`
*/
size_t vollo_rt_model_output_num_elements(
vollo_rt_context_t vollo, size_t model_index, size_t output_index);
/**
* In a streaming model, the streaming dimension is not part of the shape.
*
* - It returns -1 when there is no streaming dimension
* - It otherwise returns the dim index
* For example, for a shape `(a, b, c)` and streaming dim index 1, the full shape is:
* `(a, streaming_dim, b, c)`
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `input_index < vollo_rt_model_num_inputs`
*/
int vollo_rt_model_input_streaming_dim(
vollo_rt_context_t vollo, size_t model_index, size_t input_index);
/**
* In a streaming model, the streaming dimension is not part of the shape.
*
* - It returns -1 when there is no streaming dimension
* - It otherwise returns the dim index
* For example, for a shape `(a, b, c)` and streaming dim index 1, the full shape is:
* `(a, streaming_dim, b, c)`
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `output_index < vollo_rt_model_num_outputs`
*/
int vollo_rt_model_output_streaming_dim(
vollo_rt_context_t vollo, size_t model_index, size_t output_index);
/**
* Get the number type of an input at the given index
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `input_index < vollo_rt_model_num_inputs`
*/
number_format vollo_rt_model_input_format(
vollo_rt_context_t vollo, size_t model_index, size_t input_index);
/**
* Get the number type of an output at the given index
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - `output_index < vollo_rt_model_num_outputs`
*/
number_format vollo_rt_model_output_format(
vollo_rt_context_t vollo, size_t model_index, size_t output_index);
/**
* Returns whether the model can be reset to its initial state (i.e. was compiled with
* `generate_state_reset = True`)
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
*/
bool vollo_rt_model_is_resettable(vollo_rt_context_t vollo, size_t model_index);
Running inference
The interface returns results asynchronously so that inference requests can be made as fast
as the system can support, without blocking on output data being returned. This way, it also
supports running multiple requests concurrently.
Before any compute is started a job with associated input and output buffers needs to be
registered with the runtime using one of vollo_rt_add_job_bf16 or vollo_rt_add_job_fp32.
The bf16 variant uses bfloat16
which is effectively a cropped version of single precision floating point format
fp32 (same exponent, smaller mantissa).
Note: do NOT use C floating point literals for bf16 as it is simply a uint16_t in the API
A fp32 variant is also provided despite the Vollo accelerator expecting its
inputs and outputs to be in fp16. If you are working with fp32, prefer
this version instead of the bf16 variant as it is able to make the conversion
while copying to/from DMA buffers, avoiding an extra copy.
/**
* Sets up a computation on the vollo accelerator where the inputs and outputs are in brain-float 16
* format.
*
* Note: The computation is only started on the next call to vollo_rt_poll. This way it is possible
* to set up several computations that are kicked off at the same time.
*
* - vollo:
* the context that the computation should be run on
* - model_index:
* the model to run
* - user_ctx:
* a user context that will be returned on completion. This can be used to disambiguate when
* multiple models are running concurrently.
* NOTE: the jobs for a single model are guaranteed to come back in order, but the jobs for
* different models are not.
* - input_data:
* a pointer to the start of an array with pointers to the start of the data to each input the
* number of inputs is given by `vollo_rt_model_num_inputs` each input length is the product of
* the shape given by `vollo_rt_model_input_shape`
* (or more convenient: `vollo_rt_model_input_num_elements`)
* lifetime:
* - The outer array only needs to live until `vollo_rt_add_job_bf16` returns
* - The input buffers need to live until `vollo_rt_poll` returns with the completion for
* this job
* - output_data:
* a pointer to the start of an array with pointers to the start of the data to each output
* buffer the number of outputs is given by `vollo_rt_model_num_outputs` each output length is
* the product of the shape given by `vollo_rt_model_output_shape`
* (or more convenient: `vollo_rt_model_output_num_elements`)
* lifetime:
* - The outer array only needs to live until `vollo_rt_add_job_bf16` returns
* - The output buffers need to live until `vollo_rt_poll` returns with the completion for
* this job
*/
vollo_rt_error_t vollo_rt_add_job_bf16(
vollo_rt_context_t vollo,
size_t model_index,
uint64_t user_ctx,
const bf16* const* input_data,
bf16* const* output_data);
vollo_rt_error_t vollo_rt_add_job_fp32(
vollo_rt_context_t vollo,
size_t model_index,
uint64_t user_ctx,
const float* const* input_data,
float* const* output_data);
To actually start and later complete an inference you must use the vollo_rt_poll function
multiple times. It is typically called in a loop (with a timeout) until some or all of the jobs
are completed.
/**
* Poll the vollo accelerator for completion.
*
* Note: Polling also initiates transfers for new jobs, so poll must be called
* before any progress on these new jobs can be made.
*
* num_completed: out: the number of completed user_ctx returned
* returned_user_ctx: buffer for the returned user_ctx of completed jobs, this will only be
* valid until the next call to vollo_rt_poll.
*/
vollo_rt_error_t vollo_rt_poll(
vollo_rt_context_t vollo, size_t* num_completed, const uint64_t** returned_user_ctx);
Partial updates
To reduce the amount of data that needs to be transferred to/from the accelerator, is is possible to update specific indices of the input buffer stored on the accelerator.
There are two functions to achieve this:
- a simple one for a single bf16 input:
vollo_rt_add_job_bf16_partial_update - a more general one for multiple inputs/outputs and fp32 data:
vollo_rt_add_job_partial_updates
/**
* Sets up a computation on the vollo accelerator where the inputs and outputs are in brain-float 16
* format.
*
* Takes the input from the previous job and updates individual values as provided and uses that as
* the new input. This can be more efficient due to smaller IO requirements.
*
* Limitations:
* - Only single model programs are supported
* - Only single input models are supported
* - Only inputs with up to 65536 elements supported (for now)
* - Currently not supported for a VM
*
* Note: The computation is only started on the next call to vollo_rt_poll. This way it is possible
* to set up several computations that are kicked off at the same time.
*
* - vollo:
* the context that the computation should be run on
* - model_index:
* the model to run
* - user_ctx:
* a user context that will be returned on completion
* - num_input_updates:
* The number of elements in the input array to be updated
* It MUST be at most the number of input elements (see `vollo_rt_model_input_num_elements`),
* although using `vollo_rt_add_job_bf16` will be more efficient when updating many elements
* - input_update_indices:
* An array of indices (with `num_input_updates` elements) of the elements to update
* Each index MUST be less than the number of input elements
* (see `vollo_rt_model_input_num_elements`)
* Updating multiple times the same index in a given update has undefined semantics
* lifetime:
* - The input_update_indices array needs to live until `vollo_rt_poll` returns with the
* completion for this job
* - input_update_values:
* An array of values (with `num_input_updates` elements) with the new values of the
* elements to update
* Values may not be NaN
* lifetime:
* - The input_update_values array needs to live until `vollo_rt_poll` returns with the
* completion for this job
* - output_data:
* a pointer to the start of an array with pointers to the start of the data to each output
* buffer the number of outputs is given by `vollo_rt_model_num_outputs` each output length is
* the product of the shape given by `vollo_rt_model_output_shape`
* (or more convenient: `vollo_rt_model_output_num_elements`)
* lifetime:
* - The outer array only needs to live until `vollo_rt_add_job_bf16_partial_update` returns
* - The output buffers need to live until `vollo_rt_poll` returns with the completion for
* this job
*/
vollo_rt_error_t vollo_rt_add_job_bf16_partial_update(
vollo_rt_context_t vollo,
size_t model_index,
uint64_t user_ctx,
uint32_t num_input_updates,
const uint32_t* input_update_indices,
const bf16* input_update_values,
bf16* const* output_data);
Resetting model state
Stateful models can have their state reset with vollo_rt_add_reset_job. The model must have been
compiled with generate_state_reset = True.
/**
* Resets a model to its initial state.
*
* Unlike `vollo_rt_add_job`, this function does not take in a `user_ctx`, because there is no
* output to receive. Consequently, `vollo_rt_poll` will not notify you when a reset job is
* done, but it will be done before any subsequent jobs for that model.
*
* Note: The reset is only started on the next call to `vollo_rt_poll`. This way it is possible
* to set up several computations that are kicked off at the same time. Reset jobs are in the
* same queue as regular jobs.
*
* - vollo:
* the context that the model should be reset on
* - model_index:
* the model to reset
*
* Requirements (panics otherwise):
* - a program was loaded with `vollo_rt_load_program`
* - `model_index < vollo_rt_num_models`
* - the model was compiled with `generate_state_reset = True`
*/
vollo_rt_error_t vollo_rt_add_reset_job(vollo_rt_context_t vollo, size_t model_index);
Vollo RT Example
The full code for this example can be found in example/identity.c.
Here we will work through it step by step.
First we need to get hold of a Vollo RT context:
//////////////////////////////////////////////////
// Init
vollo_rt_context_t ctx;
EXIT_ON_ERROR(vollo_rt_init(&ctx));
Note: throughout this example we use EXIT_ON_ERROR, it is just a convenient way to handle errors
Then we need to add accelerators, the accelerator_index refers to the index of
the Vollo accelerator in the sorted list of PCI addresses, simply use 0 if you
have a single accelerator, or just want to use the first one.
//////////////////////////////////////////////////
// Add accelerators
size_t accelerator_index = 0;
EXIT_ON_ERROR(vollo_rt_add_accelerator(ctx, accelerator_index));
This step will check the accelerator license and make sure the bitstream is the correct version and compatible with this version of the runtime.
Then we load a program:
//////////////////////////////////////////////////
// Load program
// Program for a block_size 64 accelerator
const char* vollo_program_path = "./identity_b64.vollo";
EXIT_ON_ERROR(vollo_rt_load_program(ctx, vollo_program_path));
Here we're using a relative path (in the example directory) to one of the
example Vollo program, a program that computes the identity function for a tensor of size 128. The program
is specifically for a block_size 64 version of the accelerator such as the
default configuration for the IA840F FPGA.
Then we setup some inputs and outputs for a single inference:
//////////////////////////////////////////////////
// Setup inputs and outputs
size_t model_index = 0;
// Assert model only has a single input and a single output tensor
assert(vollo_rt_model_num_inputs(ctx, model_index) == 1);
assert(vollo_rt_model_num_outputs(ctx, model_index) == 1);
assert(vollo_rt_model_input_num_elements(ctx, model_index, 0) == 128);
assert(vollo_rt_model_output_num_elements(ctx, model_index, 0) == 128);
float input_tensor[128];
float output_tensor[128];
for (size_t i = 0; i < 128; i++) {
input_tensor[i] = 42.0;
}
We check that the program metadata matches our expectations and we setup an input and output buffer.
Then we run a single inference:
//////////////////////////////////////////////////
// Run an inference
single_shot_inference(ctx, input_tensor, output_tensor);
Where we define a convenience function to run this type of simple synchronous inference on top of the asynchronous Vollo RT API:
// A small wrapper around the asynchronous Vollo RT API to block on a single inference
// This assume a single model with a single input and output tensor
static void single_shot_inference(vollo_rt_context_t ctx, const float* input, float* output) {
size_t model_index = 0;
const float* inputs[1] = {input};
float* outputs[1] = {output};
// user_ctx is not needed when doing single shot inferences
// it can be used when doing multiple jobs concurrently to keep track of which jobs completed
uint64_t user_ctx = 0;
// Register a new job
EXIT_ON_ERROR(vollo_rt_add_job_fp32(ctx, model_index, user_ctx, inputs, outputs));
// Poll until completion
size_t num_completed = 0;
const uint64_t* completed_buffer = NULL;
size_t poll_count = 0;
while (num_completed == 0) {
EXIT_ON_ERROR(vollo_rt_poll(ctx, &num_completed, &completed_buffer));
poll_count++;
if (poll_count > 1000000) {
EXIT_ON_ERROR("Timed out while polling");
}
}
}
This function does 2 things. First it registers a new job with the Vollo RT context and then it polls in a loop until that job is complete.
For a more thorough overview of how to use this asynchronous API to run multiple
jobs concurrently take a look at example/example.c
And finally we print out the newly obtained results and cleanup the Vollo RT context:
//////////////////////////////////////////////////
// Print outputs
printf("Output values: [");
for (size_t i = 0; i < 128; i++) {
if (i % 8 == 0) {
printf("\n ");
}
printf("%.1f, ", output_tensor[i]);
}
printf("\n]\n");
//////////////////////////////////////////////////
// Release resources / Cleanup
vollo_rt_destroy(ctx);
Resetting model state
If the model was compiled with generate_state_reset = True, we can reset the state of the
model before starting an inference. Here's an example from example/example.c:
// Reset the state of the model, if desired
if (
options.state_reset_spacing != 0
&& inf_started % options.state_reset_spacing == 0
// No need to reset before the first inference
&& inf_started != 0) {
EXIT_ON_ERROR(vollo_rt_add_reset_job(ctx, model_index));
}
// Add an inference
EXIT_ON_ERROR(vollo_rt_add_job(
ctx,
model_index,
user_ctx,
(const number_format*)input_buffer_formats,
(const void* const*)test_inputs_dyn[input_ix],
(const number_format*)output_buffer_formats,
model_outputs_dyn));
Vollo RT Python Example
The Vollo RT Python bindings are provided for convenience, the runtime performance of this API is not a priority.
Here is a minimal way to use the Vollo RT Python bindings:
import vollo_rt
import torch
import os
with vollo_rt.VolloRTContext() as ctx:
ctx.add_accelerator(0)
if ctx.accelerator_block_size(0) == 32:
ctx.load_program(f"{os.environ["VOLLO_SDK"]}/example/identity_b32.vollo")
else:
ctx.load_program(f"{os.environ["VOLLO_SDK"]}/example/identity_b64.vollo")
input = torch.rand(*ctx.model_input_shape()).bfloat16()
output = ctx.run(input)
torch.testing.assert_close(input, output)
print("Success!")
Vollo IP Core
The Vollo IP Core is an encrypted netlist that can be integrated into your own FPGA design. It is available upon request, and can be configured by number of cores and the core size. The IP Core is currently only available for Agilex FPGAs.
An IP Core release consists of the following components:
- Vollo IP Core encrypted netlist
- Vollo Config C API for programming and activating the IP Core
- Example design for the IP Core
- Compiler configuration file for the IP Core, which can be used by the compiler to generate programs for the particular IP Core configuration
A simulation model of the IP Core is also available for bringing up and testing the host/RTL interfaces in simulation, without hardware or a license.
Selecting an IP core configuration
The Vollo IP core is scalable by the number of cores and the size of each core. To identify the best configuration for your application, we advise the following steps:
-
Test your ML models by running them through the Vollo compiler with different configurations. The virtual machine will give you performance metrics for each configuration.
-
Reference the resource usage table below to understand the resource requirements for each configuration.
Note, for initial integration and testing, it is recommended to start with a single core and a small block size. This will allow for quicker iteration and debugging of the system.
Compiler support
To test an IP Core configuration with the Vollo compiler, you can create the configuration in python as follows:
import vollo_compiler
ip_core_config = vollo_compiler.Config.ip_core(num_cores = 1, block_size = 32)
Once you have received your Vollo IP core, it comes bundled with a Vollo accelerator configuration file in JSON format,
in vollo_ip_core/vollo-ip-core-config.json.
This can be loaded into an accelerator configuration in python as follows:
import os
os.mkdir("vollo_ip_core")
vollo_compiler.Config.save(vollo_compiler.Config.ip_core(num_cores = 1, block_size = 32), "vollo_ip_core/vollo-ip-core-config.json")
ip_core_config = vollo_compiler.Config.load("vollo_ip_core/vollo-ip-core-config.json")
os.remove("vollo_ip_core/vollo-ip-core-config.json")
os.rmdir("vollo_ip_core")
From here, Vollo programs can be generated using the same workflow as described in example 1
using the config imported above in the call to to_program:
import torch
import torch.nn as nn
import torch.nn.functional as F
import vollo_torch
class MLP(nn.Module):
def __init__(self, input_size, output_size, hidden_size):
super().__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, hidden_size)
self.out = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
residual = x
x = F.relu(self.fc2(x)) + residual
return self.out(x)
# Make a pytorch model
input_size = 784
output_size = 10
hidden_size = 128
model = MLP(input_size, output_size, hidden_size)
# Annotate the model with activation shapes
input = torch.randn(input_size)
(model, expected_output) = vollo_torch.fx.prepare_shape(model, input)
# Compile to a Vollo program using the loaded ip_core_config
nnir = vollo_torch.fx.nnir.to_nnir(model)
program = nnir.to_program(ip_core_config)
Run the VM to get the cycle count:
vm = program.to_vm()
vm_output = vm.run(input.detach().numpy())
torch.testing.assert_close(expected_output, torch.from_numpy(vm_output), atol = 1e-2, rtol=1e-2)
print("cycle count:", program.cycle_count_per_inference())
Resource usage
The following table shows the resource usage of the Vollo IP Core for different configurations. Note, these resources may vary depending on the Vollo SDK version.
The block size determines the side of the matrix block. The core scales with the square of this parameter e.g. a block size 64 core is around 4 times larger than a block size 32 core.
| Cores | Block size | ALMs | M20Ks | DSPs |
|---|---|---|---|---|
| 1 | 32 | 43K | 1084 | 624 |
| 2 | 32 | 78K | 2000 | 1248 |
| 3 | 32 | 115K | 2932 | 1872 |
| 4 | 32 | 152K | 3880 | 2496 |
| 5 | 32 | 194K | 4844 | 3120 |
| 6 | 32 | 231K | 5824 | 3744 |
| 1 | 64 | 106K | 3065 | 2400 |
| 2 | 64 | 207K | 5840 | 4800 |
| 3 | 64 | 308K | 8631 | 7200 |
IP Core Interface
The Vollo IP Core is programmed with a neural network model (Vollo program) via a configuration bus. Once this is done, the IP Core can run the model by streaming input data to the IP Core and receiving the output data.

The IP Core has the following interfaces:
- Config clock and reset signals. This a clock which is expected to be at a frequency of around 100MHz. It is only used for configuration and not for running the model.
- Config bus. This is a 32-bit wide AXI4-Lite bus used to activate the device with a license key and to configure the IP Core. It is synchronous to the config clock.
- Compute clock and reset signals. This is the clock used for running the model. In the example design this clock frequency is set to 320MHz.
- Input data bus. This a AXI4-Stream bus used to stream input data to the IP Core. It size varies depending on the size of the cores in the IP. For a 32-block size design, this is 512 wide (16 bits per value using brainfloat 16). It is synchronous to the compute clock.
- Model selection bus. This is an AXI4-Stream interface for providing the model index. It is synchronous to the compute clock.
- Output data bus. This a AXI4-Stream bus used to stream output data from the IP Core. It is synchronous to the compute clock.
Configuration bus
The configuration bus is a 32-bit wide AXI4-Lite bus. The normal rules for AXI4-Lite buses should be followed with the following exceptions:
- Write strobe: The write strobe should either be fully asserted or fully deasserted. Partially asserted write strobes are not supported.
- The protection signals,
config_awprotandconfig_arprot, are unused and ignored.
Verilog signals:
// Config interface clock and active-high synchronous reset:
input logic config_clock
, input logic config_reset
// Config AXI4-Lite interface.
// The config_awprot and config_arprot inputs are unused
// and ignored.
, input logic config_awvalid
, output logic config_awready
, input logic [20:0] config_awaddr
, input logic [2:0] config_awprot
, input logic config_wvalid
, output logic config_wready
, input logic [31:0] config_wdata
, input logic [3:0] config_wstrb
, input logic config_arvalid
, output logic config_arready
, input logic [20:0] config_araddr
, input logic [2:0] config_arprot
, output logic config_rvalid
, input logic config_rready
, output logic [31:0] config_rdata
, output logic [1:0] config_rresp
, output logic config_bvalid
, input logic config_bready
, output logic [1:0] config_bresp
The AXI4-Lite interface is used to configure the Vollo IP Core with a Vollo program. It must
accessible from a system running the vollo_cfg software that can drive the config bus (usually the
host). See Vollo configuration API.
You can load a new program by re-running the configuration.
Input and Output Streams
The input and output streams are AXI4-Stream interfaces. Each input and output is packed as
a flattened tensor and padded to the next multiple of block-size. The data should be packed in
little-endian format. The output stream includes tkeep and tlast signals to indicate when the
end of the packet and which bytes are valid (i.e. not padding).
For example, an input of tensor dimension [62] to an ip-core with block size 32 should be provided
as two words, the first with a full 32 brainfloat values, and the second with the remaining 30
brainfloat values and 2 padding values. They should be packed as follows:
| Word | 511:496 | 495:480 | 479:464 | ... | 31:16 | 15:0 |
|---|---|---|---|---|---|---|
| 0 | input[31] | input[30] | input[29] | ... | input[1] | input[0] |
| 1 | X | X | input[61] | ... | input[33] | input[32] |
When a model has multiple inputs or outputs, they should be in order, and each input or output padded to the next multiple of block size.
Verilog signals:
// Core clock and active-high synchronous reset:
, input logic compute_clock
, input logic compute_reset
// Input AXI4-Stream interface:
, input logic input_tvalid
, output logic input_tready
, input logic [511:0] input_tdata
// Output AXI4-Stream interface:
, output logic output_tvalid
, input logic output_tready
, output logic output_tlast
, output logic [63:0] output_tkeep
, output logic [511:0] output_tdat
Model Selection
The model_select bus picks which model is to be used for the next compute job, and should be provided once per job. It can be driven before or after driving data to the IP Core. Even if the IP Core is programmed with a single model, there will be no output for a job until the model index is provided.
// Model select AXI4-Stream interface:
, input logic model_select_tvalid
, output logic model_select_tready
, input logic [15:0] model_select_tdata
Verilog instantiation
The complete component interface is as follows:
module vollo_ip_core
(
// Config interface clock and active-high synchronous reset:
input logic config_clock
, input logic config_reset
// Config AXI4-Lite interface.
// The config_awprot and config_arprot inputs are unused
// and ignored.
, input logic config_awvalid
, output logic config_awready
, input logic [20:0] config_awaddr
, input logic [2:0] config_awprot
, input logic config_wvalid
, output logic config_wready
, input logic [31:0] config_wdata
, input logic [3:0] config_wstrb
, input logic config_arvalid
, output logic config_arready
, input logic [20:0] config_araddr
, input logic [2:0] config_arprot
, output logic config_rvalid
, input logic config_rready
, output logic [31:0] config_rdata
, output logic [1:0] config_rresp
, output logic config_bvalid
, input logic config_bready
, output logic [1:0] config_bresp
// Core clock and active-high synchronous reset:
, input logic compute_clock
, input logic compute_reset
// Model select AXI4-Stream interface:
, input logic model_select_tvalid
, output logic model_select_tready
, input logic [15:0] model_select_tdata
// Input AXI4-Stream interface:
, input logic input_tvalid
, output logic input_tready
, input logic [511:0] input_tdata
// Output AXI4-Stream interface:
, output logic output_tvalid
, input logic output_tready
, output logic output_tlast
, output logic [63:0] output_tkeep
, output logic [511:0] output_tdata
);
Quartus Integration
Quartus license for Encrypted RTL
Add the quartus license file, vollo_ip_core/vollo-ip-quartus.lic, to Quartus to decrypt the Vollo IP core. You can either:
-
Add the license file to your license server.
-
Add the license file locally within Quartus by setting the environment variable
LM_LICENSE_FILEor adding the license file in the GUITools > License Setup.
Sourcing design
The following files need sourcing:
vollo_ip_core/vollo_ip_core.svthe top-level interface.vollo_ip_core/vollo_ip_core_internal.svthe encrypted RTL design.- The memory initialization files,
.mif, invollo_ip_core.
This can be done in the GUI or by using the following tcl commands:
require file_util
foreach file [fileutil::findByPattern vollo_ip_core *.sv] {
set_global_assignment -name SYSTEM_VERILOG_FILE $file
}
foreach file [fileutil::findByPattern vollo_ip_core *.mif] {
set_global_assignment -name MIF_FILE $file
}
Runtime configuration
The Vollo IP Core needs to be programmed with a Vollo program and have its license activated before it can run inferences. This configuration happens over the AXI4-Lite configuration bus of the Vollo IP Core.
A C library is provided to do this configuration. In order to use the library the user must supply functions for writing and reading to Vollo IP Core configuration bus. The library then has functions to activate the IP core using a license and configure the core with a program.
The C API is provided as part of the VOLLO_SDK:
- Header is
$VOLLO_SDK/include/vollo-cfg.h - Library is
$VOLLO_SDK/lib/libvollo_cfg.so(orlibvollo_cfg.afor static linking)
The key concept behind this API is that the user of the Vollo IP Core is in full control of the communication over the configuration bus. Please refer to the documentation in the header file for details on how to use the API and which considerations should be taken when setting up communication with the configuration bus.
Licensing a Vollo IP Core
On the first use of an FPGA with the Vollo IP Core, information about the device needs to be gathered in order to acquire a license.
The section about licensing describes how to use vollo-tool to get the device ID information.
Unfortunately this method does not work for the Vollo IP Core, as vollo-tool does not know how to communicate with the Vollo IP Core.
The C API provides the function vollo_cfg_print_device_id, this prints the relevant information to STDOUT using the provided reader and writer to communicate with the IP Core.
Once a license has been acquired, the function vollo_cfg_activate_license is used to activate a license (it uses the MYRTLE_LICENSE environment variable to find the license file).
Example design
The Vollo IP Core release contains an example runtime which makes use of this API: vollo_ip_core_example/runtime/vollo_cfg_example.c
The example runtime is written to work with the example RTL instantiation of the Vollo IP Core which sets up the configuration bus to be accessible over BAR 2 using the ifc_uio kernel driver
(the patched version of the kernel driver provided in VOLLO_SDK works just as well as the original Intel provided one for this example)
These are the main steps of the configuration are:
- Acquire and activate a license
- Load a Vollo program onto the Vollo IP Core with
vollo_cfg_load_program
All of these functions use the same API with a custom reader and writer to communicate with the configuration bus. The reader and writer are quite generic and take a user controllable context in order to be implementable in most environments (do tell us if this API does not suit your needs).
To build and run the example runtime, please refer to: vollo_ip_core_example/runtime/README.md
Example design
The Vollo IP Core comes with a simple example design.
The example design is for the Bittware IA-420F device - but can be converted to a different device by adapting the relevant files.
The example design contains:
rtl: a simple instantiation ofvollo_ip_corewith the input and output AXI4-Stream interfaces are hooked up to directly MMIO. An efficient design should instead control input and output directly from the FPGA, or if control from a CPU host is needed then use a proper DMA instead.bitstream: this is a pre-built bitstream of the provided RTL, it is provided to speed up testing of the runtimeruntime: the runtime showcases how to configure and activate the Vollo IP Core using thevollo-cfglibrary. It also controls IO to do basic inferences (this IO mechanism is only an example, it is not optimized for performance)
Building RTL
A script is provided to automate building the RTL: vollo_ip_core_example/rtl/build.sh
Alternatively, you can perform the following steps manually:
-
Run QSYS: This example project is provided as a TCL generated QSYS project. So we need to generate the top level QSYS:
qsys-script --script=qsys/mcdma_sys.tcl --quartus-project=agilexAnd generate RTL for that QSYS project:
qsys-generate mcdma_sys.qsys --synthesis=VERILOG --parallel --quartus-project=agilex.qpf -
Run Quartus: This step can be done manually in the GUI or with the provided
flow.tcl(which runssyn,fit,sta, andasm):quartus_sh -t flow.tclIn order to synthesise the Vollo IP Core which is encrypted, make sure to add the
vollo-ip-quartus.licfile to your license server, or simply add it to theLM_LICENSE_FILEenvironment variable (see Quartus integration).
Simulation model
The Vollo IP simulation model (vollo-ip-sim) is a simulation-only stand-in for
the Vollo IP Core. It lets you bring up and test the host/RTL interfaces
(AXI4-Lite config + AXI4-Stream model-select / input / output) under AMD
XSim or Siemens QuestaSim/ModelSim, without hardware or a Vollo
license.
It is released alongside the SDK as a self-extracting vollo-ip-sim-<version>.run
archive, available from the GitHub Releases page. Running it
presents the EULA and unpacks a vollo-ip-sim-<version>/ directory containing the
model, the DPI driving code, and a run.sh entry point. See the bundle's own
README.md for unpacking and a quick start; this page is the full walk-through.
What it is
Every flow simulates rtl/vollo_ip_core.sv — the same wrapper top you
integrate, with the discovery registers and config window of the Vollo IP
Core. It provides two compute backends:
- stub — no compute. Each model is described by four config words (input size, output size, delay, enable); output beats carry synthetic metadata (beat index + model). Needs no libraries and is synthesizable.
- vm — runs an actual
.volloprogram through an embeddedvollo-rt, so the output is the true inference result. Needs the Vollo SDK.
The stream data width is BLOCK_SIZE * 16 bits; the released build uses
BLOCK_SIZE=32 (512-bit). As on the IP core, the input stream is plain
tvalid/tready/tdata (sizes come from config, not stream framing); the
output stream carries tkeep/tlast to mark the end of each packet and which
bytes are valid.
Requirements
- A SystemVerilog simulator, selected with
VOLLO_IP_SIMULATOR:vivado(default) — AMD Vivado/XSim. Either putxvlog/xelab/xsimonPATH, or setVIVADO_SETTINGS=/path/to/Vivado/settings64.sh.questa/modelsim— Siemens QuestaSim/ModelSim. Putvlog/vsimonPATHyourself (and any license env your install needs).
- A C compiler (
cc/gcc) andpython3. - For anything involving a
.volloprogram:VOLLO_SDKpointing at the unpackedvollo-sdk-*/directory. No flow needs a Vollo license.
The three flows
run.sh <flow> exposes three flows for running the simulation model
(./run.sh --help lists them with their options). They differ in who programs
the config bus and which compute backend runs:
- registers — the bundled python client writes the stub's per-model config
registers over DPI with explicit values. No
.vollorequired, nothing from the SDK touches the bus: good for bring-up, and as a reference for driving the stub if you can't hook up the DPI. - vollo-cfg — the
vollo-cfglibrary programs the bus withvollo_cfg_load_program, which works on all versions of the Vollo IP (hardware, stub and vm).
| Flow | Config programmed by | Compute | Needs | What it proves |
|---|---|---|---|---|
registers | python client (DPI) | stub | — | the host/RTL protocol end to end (synthetic output) |
vollo-cfg-stub | vollo-cfg library | stub | SDK | your config path, programmed by vollo-cfg |
vollo-cfg-vm | vollo-cfg library | vollo-rt | SDK | true, bit-accurate inference output |
registers takes its sizes from the command line (zero dependencies beyond a
simulator + C compiler + python3), or from a .vollo's metadata if you
pass one (which needs $VOLLO_SDK for vollo-tool). In every flow,
model-select and input data are driven over DPI by the python client.
# Zero-dependency: stub configured over DPI with explicit sizes.
./run.sh registers --input-size 64 --output-size 64
# Same, but the sizes come from a program's metadata (needs $VOLLO_SDK):
./run.sh registers path/to/program.vollo
# Config programmed by the vollo-cfg library; stub compute (needs $VOLLO_SDK):
./run.sh vollo-cfg-stub path/to/program.vollo
# Same library, vm compute: bit-accurate inference through vollo-rt (needs $VOLLO_SDK):
./run.sh vollo-cfg-vm --check-method identity path/to/program.vollo
The released build is BLOCK_SIZE=32, so use a matching b32 program (the SDK
ships example/identity_b32.vollo). Select the simulator with
VOLLO_IP_SIMULATOR (default vivado), e.g. to run the on-ramp under
QuestaSim:
VOLLO_IP_SIMULATOR=questa ./run.sh registers --input-size 64 --output-size 64
Each run prints its work directory and the simulator log, and exits non-zero
unless it sees All tests passed.. The work directory is kept either way, so
you can inspect the logs and the waveform afterwards; on failure the relevant
logs are also dumped to stderr. To choose its location (instead of a fresh temp
dir), set WORKDIR.
Note: the DPI layer uses a Unix domain socket, whose path is limited to ~108 characters. If you point
WORKDIRat a very deep directory the run can fail withfailed to open DPI Unix socket server; use a shorterWORKDIR. The default temp directory is short and unaffected.
Checking the output on the vm backend
The vm backend runs true inference, so its output can be checked. run.sh vollo-cfg-vm offers two ways to do that, and they are alternatives:
-
--check-method— compare the output against a known-good value:identity(the default) drives an input equal to the expected output, so it only makes sense for an identity program.reference=path/to/<prefix>_expected_<index>_<step>.npycompares against reference tensors.<index>and<step>are integers:<index>is the tensor index (in tensor order) and<step>the timestep/sample. You pass only the_expected_file; the matching<prefix>_input_<index>_<step>.npyinput files in the same directory are picked up automatically by their shared prefix. If no_input_files are present the check falls back to a synthetic input (and then only supports a single-output model); a partial set of input files for a step is an error.
The reference comparison is exact (bit-for-bit on the bf16 wire bytes), with no tolerance. It is meant for regression against Vollo's own reference vectors — a tensor exported from your framework will almost never match exactly, since Vollo runs in bf16 rather than the framework's float32.
-
--input/--save-output— feed your own input and save the actual output, so you can compare against your framework yourself, with your own tolerance. This is the right choice for validating a compiled model against PyTorch or TensorFlow:# Feed your own input; write the actual inference output as a float32 .npy. ./run.sh vollo-cfg-vm --input my_input.npy --save-output my_output.npy path/to/program.volloPass one
--inputper input tensor, in tensor order; for a model with multiple output tensors the results are written tomy_output_0.npy,my_output_1.npy, and so on. Save the.npyfiles asfloat32with the model's tensor shapes (fromvollo-tool program-metadata); the harness converts to the model's precision. You can then diffmy_output.npyagainst your reference output in Python:import numpy as np np.testing.assert_allclose(reference_output, np.load("my_output.npy"), atol=1e-2, rtol=1e-2)
If all you need is to check a compiled program's numerics against your source
model — with no RTL/host-interface simulation — you don't need this model at
all: load the program into the Vollo compiler's bit-accurate VM in Python
(vollo_compiler.Program.load(...).to_vm().run(...)) and compare there. The
vm backend here runs that same VM; --save-output gives you its result out of
the RTL simulation. See the compiler simulation
docs.
Architecture
vollo_ip_core has its config interface (config, AXI4-Lite) on one edge
and its data interfaces (model_select, input, output, AXI4-Stream) on
the other. Two things can program config: the vollo-cfg library
(vollo_cfg_load_program, same as on hardware), or the bundled python client
writing explicit register values (the registers flow). The data streams are
driven by the python client (--mode input), or by your own RTL once you
integrate.
In simulation, the host-side drivers don't touch the IP's buses directly: each
goes over a Unix socket into the simulator and through a DPI layer —
dpi_axi_lite32_master.sv / dpi_axi_stream_master.sv drive the IP's AXI buses.
That whole DPI layer is bundled scaffolding you don't ship; your own RTL drives
the IP's ports directly (stages 2–3 below).
In the diagrams, colour shows ownership: green is the vollo-cfg library
(the production Myrtle software), blue is bundled sim tooling (the host clients and
the dpi_sim_socket DPI layer), orange is user code — the parts you build. The
IP's own ports are neutral (purple = AXI4-Lite, grey = AXI4-Stream).
How the simulation is driven (DPI)
A small socket bridge (dpi/dpi_sim_socket.c) connects the SystemVerilog
testbench to host-side drivers over a Unix socket:
dpi/dpi_axi_lite32_master.svdrives the config AXI4-Lite bus.dpi/dpi_axi_stream_master.svdrives the model-select + input streams.dpi/dpi_axi_stream_slave.svcaptures the output stream and routes its beats back over the socket (the slave counterpart to the stream master).dpi/dpi_stream_client.pyis the host scenario runner (registers config + input + output checks); config writes go through the wrapper's config window at0x10_0000, like every other agent on the bus. It never reads a.volloitself — program loading isvollo-cfg's job, viadpi/vollo_cfg_socket_loader.c, the bridge that runs thevollo-cfglibrary against the simulated config bus.
The registers flow drives both buses straight from the python client over
this DPI layer — no .vollo, no SDK:

The vollo-cfg-stub / vollo-cfg-vm flows are the same, except config is
programmed by the vollo-cfg library instead of the python client — that's
stage 1 of the integration below.
Integration stages
The model lets you replace one piece at a time with your own; each stage swaps
one block and leaves the rest in place. Across all three, config is always the
vollo-cfg library — what you take over is first the data path, then the
config transport beneath vollo-cfg. Each stage is one concrete script:
| Stage | You provide | You run |
|---|---|---|
| 1. Fully bundled | just a .vollo | run.sh vollo-cfg-{stub,vm} |
| 2. User data path | your data-path RTL | example/user-data-path/run.sh (a worked stage-2 example) |
| 3. User config transport | your config-bus driver too | your sim, with vollo-cfg hooked up to it however you like |
1. Fully bundled

vollo-cfg (through vollo_cfg_socket_loader) programs config, and
dpi_stream_client.py --mode input drives the streams and checks output. This
is what run.sh runs for you:
./run.sh vollo-cfg-vm --check-method identity path/to/program.vollo
(The zero-dependency registers flow is the same picture with the python client
driving config too, instead of vollo-cfg.)
2. User data path

Connect your RTL to the model_select / input / output AXI4-Stream ports of
rtl/vollo_ip_core.sv and drop the python data client and the DPI stream
master/slave. Keep the config bus wired to dpi/dpi_axi_lite32_master.sv + the
socket bridge (dpi/dpi_sim_socket.c) — config is unchanged, still vollo-cfg.
The bundle ships a complete worked example of this at
example/user-data-path/ — a testbench + your-RTL-goes-here data path + a
run.sh that builds, launches, programs config and checks the result. Start
there:
cd example/user-data-path && ./run.sh # identity in == out, driven by the example's own RTL
Its README.md is the reference for the data-path contract — beat width
(512-bit / 64-byte), model_select = one beat carrying the model index,
ceil(size/64) input/output beats, tkeep/tlast, and how to get the sizes
from the program metadata. Note the data path needs no synchronization with the
config load: the core buffers model_select/input (deep FIFOs) and starts the
request once the program is loaded, with ordinary AXI4-Stream tready
backpressure if you outrun the buffer — so you just drive the streams.
Under the hood the example uses two standalone tools, so you can drop them into your own build:
# build the deps your testbench compiles against -- the hw-config ROM includes
# (generated_hw_config_{case,localparams}.svh) + dpi_sim_socket.so:
dpi/scripts/prepare_dpi.sh --backend vm path/to/program.vollo
# compile + launch your own testbench, exporting the socket path its DPI master
# opens; then program config over that same socket:
export DPI_SIM_UNIX_SOCKET_PATH="$PWD/dpi.sock" # your testbench opens this
# ... compile (all sources as SystemVerilog) and launch your sim here ...
dpi/scripts/drive_config.sh --unix-socket "$DPI_SIM_UNIX_SOCKET_PATH" path/to/program.vollo
The middle "compile + launch your testbench" step is the part you own; the
example's README.md documents its full contract — the source list, the required
+define+s, the dpi_sim_socket DPI library, and the DPI_SIM_UNIX_SOCKET_PATH
socket handshake. That middle step is all run.sh adds: it calls the same
prepare_dpi.sh and drive_config.sh around its own testbench — so your build
gets config programmed by the same vollo-cfg loader and checks against the same
bit-accurate output.
3. User config transport

An optional final stage is to connect the vollo-cfg library to your own
simulation directly, in place of drive_config.sh (the DPI lite master +
socket). It is still the same vollo-cfg library issuing the same
vollo_cfg_load_program writes — only how those config reads/writes reach your
DUT changes — so it matches your card config-bus setup on hardware. How you make
that connection is up to you; dpi/vollo_cfg_socket_loader.c is one worked
reference — it links the SDK's lib/libvollo_cfg.a and feeds the library's
config reads/writes to the socket, so you can read it to see how the API is
called and then bridge it to your simulation however suits you.
Versions
Version Compatibility
The Vollo SDK follows a semantic versioning scheme. If the left-most non-zero component (major/minor/patch) of the version number is unchanged between two releases of the Vollo SDK, it should be possible to update to the newer version without modifying your existing code, e.g. updating from 0.12.0 to 0.12.1.
Additionally, the FPGA bitstream is stable between patch releases, so you do not have to reprogram the FPGA with an updated Vollo SDK bitstream unless the minor or major version numbers have changed.
Documentation for Previous Versions
Documentation for previous versions of the Vollo SDK can be found in this listing:
Release Notes
28.1.1
- Fix
vollo_torch.nn.LSTMCellusing a different cell state each time it's called - Fix a bug which caused
ProgramBuilder.to_programto fail on programs with fp8 weights - Reduce tensor descriptors used in multi-model programs, allowing more models to be combined into a program
- Fix a multi-model program intermittently running the wrong model, from some point in a run until the program is reloaded. This affected inputs transferred over MMIO (the default for small inputs) and only on some host CPUs
- Add an example in
vollo-ip-simfor using your own data path - Remove the automatic FPGA temperature monitoring added in 28.1.0. It sometimes
caused a crash with the
artenabitstream.VOLLO_RT_TEMP_LIMIT_CandVOLLO_RT_TEMP_WARN_Cno longer do anything. The monitor will be reinstated in the next hardware release with the necessary bitstream change.
28.1.0
- Add automatic FPGA temperature monitoring in Vollo RT: it warns when the
device gets hot and stops compute before it overheats, configurable with the
VOLLO_RT_TEMP_LIMIT_CandVOLLO_RT_TEMP_WARN_Cenvironment variables - Remove the unused DDR4 DIMM memory controller from the V80 and V80LL bitstreams
- Speed up model compilation
- Fix a DMA deadlock that could occur when a model output transfer was paused partway through
- Fix the input size threshold used to decide whether inputs are sent over MMIO
- Fix a stall in models with multiple MMIO inputs when an optional input is empty
- Prevent the SDK installer from opening an X11 terminal window when run non-interactively
28.0.2
- Fix a DMA buffer allocation error in vollo-rt when running many concurrent jobs with large inputs
- Fix an issue in vollo-rt when running many concurrent jobs with MMIO inputs
28.0.1
- Add support for
torch.nn.Flatten - Add support for
torch.nn.MaxPool1d,torch.nn.functional.max_pool1d - Matrix multiplication optimisations
28.0.0
- MMIO optimisations
- Speed up model compilation
- Optimise pointwise operations
- Support partial updates with inputs that have more than 65536 elements
- Support for transposed dynamic weight matmuls
- Add functions to check if a model was compiled with
generate_state_reset = Truevollo_rt_model_is_resettablein Vollo RT C/C++ APIvollo_rt.VolloRTContext.model_is_resettablein Vollo RT Python bindingsvollo_compiler.Program.model_is_resettableinvollo-compiler
- Add
vollo_rt_add_devicein Vollo RT C/C++ API as a more versatile version ofvollo_rt_add_acceleratorvollo_rt.VolloRTContext.add_devicein Vollo RT Python bindings
- Handle SIGINT in long-running
vollo_compilerfunctions - Support for non-streaming
torch.nn.Conv1d - Support
torch.sum/torch.Tensor.sumover multiple dimensions - Support variable-length arg for
dimsintorch.Tensor.permute - Fix handling of exponentiation on infinities
27.1.0
- State reset with
vollo_rt_add_reset_job(for models compiled withgenerate_state_reset = True) - Support for non-zero LSTM initial state
- Support GELU (exact and tanh approximation)
- Faster SiLU
- Improve operator fusion in some cases
- Fix a bug handling strides in slices
- Fix HwConfig info (
vollo-tool read-hw-config) of Artena bitstreams - Standardize naming of
vollo_compiler.Configpresets
27.0.1
- Reduce tensor ram usage in certain models
- Add experimental
vollo_rt_prepare_raw_buffer_output_completionandvollo_rt_check_raw_buffer_output_completionfunctions to Vollo RT for completion detection from a different thread to the one holding thevollo_rt_context
27.0.0
- IO optimization when using MMIO
- Add experimental support for specifying which cores to allocate PyTorch
operations to using
vollo_torch.CorePartition - Add support for specifying which cores to allocate models to in a multi-model
program by passing
core_indicestovollo_compiler.ProgramBuilder.add_nnir - Optimize sigmoid and SiLU activation functions
- Improve spaced latency for some stateful models that use dynamic weights
- Reduce tensor RAM usage of state in stateful models
vollo_torch.Fp8Weightsnow errors if used on operations which require bf16 weights, such as dynamic weights
26.2.0
- Support for FP8 (E4M3) weights on Versal devices using
vollo_torch.Fp8Weightscontext manager - Support for
torch.exp,torch.exp2at FP32 precision usingvollo_torch.Fp32Activationscontext manager - Support for
matmuloperations where both inputs are dynamic (non-constant) tensors, when usingallow_dynamic_weights - Optimize accumulations on Versal devices, improving performance of layers
such as
LayerNormandRMSNorm, andLinearlayers with small output features - Add support for multiple state tensors in
vollo_torch.nn.Scan - Add
allow_unserializableflag tovollo_compiler.NNIR.to_programfor testing programs which can't be serialized - Fix multi-model programs that use dynamic weights
26.1.2
- Optimize handling of biases in
Linearlayers when usingallow_dynamic_weights - Speed up model compilation
- Add
random_seedsargument tovollo_compiler.NNIR.to_program
26.1.1
- Fix V80LL initialization bitstream so that the V80LL memory can be flashed over JTAG
- Optimize handling of biases in
Linearlayers when usingallow_dynamic_weights - Add support for multiple outputs to
vollo_torch.nn.Scan - Speed up loading
.volloprograms
26.1.0
- Fix DMA bug introduced on V80 in Vollo SDK 26.0.0
- Add Alveo V80LL bitstream and
vollo_compiler.Config.v80ll_c6b32hardware config - Add support for
Linearlayers where the contracted dimension is not the data dimension via theallow_dynamic_weightsflag forvollo_compiler.NNIR.to_program - Add support for multiple inputs to
vollo_torch.nn.Scan - Add support for indexing with negative indices in:
torch.stack,torch.sum,torch.permute,torch.squeeze,torch.unsqueeze - Add support for
torch.nn.functional.linear - Add optional
biasargument tovollo_torch.nn.PaddedConv1d
26.0.2
- Update example/partial_update.c to allow multiple inputs and mixed precision
- Fix bug in FP32/multi-input partial updates
- Speed up model compilation
26.0.1
- Make
vollo-tool licenseuse the system's CA certificates - Fix bug in FP32 partial updates
26.0.0
- V80 DMA optimizations
- Support for a subset of operations at FP32
vollo-torch- Add
vollo_torch.Fp32Activationscontext manager - Add
inputs_precisionsandoutput_precisionsarguments tovollo_torch.fx.nnir.to_nnir
- Add
vollo-compiler:- Add
model_input_number_formatandmodel_output_number_formatmethods tovollo_compiler.Program - Add
vollo_compiler.NumberFormatenum
- Add
vollo-rtC/C++ API- Add
vollo_rt_add_job,vollo_rt_add_job_partial_update,vollo_rt_model_input_format,vollo_rt_model_output_format,vollo_rt_get_raw_buffer_bytesfunctions andnumber_formatenum
- Add
vollo-rtPython bindings- Add
add_job,add_job_f32,model_output_formatmethods tovollo_rt.VolloRTContext
- Add
- Memory usage and compilation time improvements in the compiler
- Add
quick_compileflag tovollo_compiler.NNIR.to_programfor faster compilation - Add
max_sparse_entriesoption tovollo_compiler.NNIR.to_programto configure the number of nonzero entries allowed in weights for non-standard memory format MatMuls - Add
token-infosubcommand tovollo-tool licenseto show information about a purchase token - Add info message to
vollo-tool license redeem-deviceif the device being redeemed for has been redeemed on an expired or nearly expiring token
25.1.2
- Reduced memory usage of the compiler during compilation of large models
- Improve
ami-tool's detection of bitstream UUIDs - Improve AMI driver's compatibility with Linux kernel versions
25.1.1
- Fix bug in
vollo-toolwherevollo-tool fpga-configdid not enumerate the V80 management physical function - Fix bug in
load-kernel-driver.shwhere the Vollo driver was loaded for the V80 management physical function instead of the AMI driver
25.1.0
- Early access support for Mamba models
- Add support for SiLU
- Add support for Softplus
- Add support for Exp, Exp2
- Add support for Sigmoid
- Add support for Softmax
- Speed up model compilation
25.0.1
- Add support for size 0 input and output tensors in the compiler
- Add
vollo_rt_model_input_shape_lenandvollo_rt_model_output_shape_lenfunctions to Vollo RT - Improve constant folding in the compiler
25.0.0
- Add early access support for Silicom fb4CGg3@VU09P
- "Spaced" inference latency optimization now applies to multi-model programs too
- Increase clock speed on V80 from 280MHz to 300MHz.
- Compiler and scheduler optimizations to improve inference latency
- Speed up model compilation
- Add support for bidirectional LSTMs
24.0.1
- Improve latency of streaming models, especially e.g. large LSTMs, when inferences have spacing between them, i.e. not being run back-to-back
- Add
spacedflag tovollo_compiler.Program.cycle_count_per_inferenceto get cycle counts of programs with or without spacing in between inferences - Speed up model compilation
24.0.0
- Improved latency when using multiple models
- Improved V80 performance
- Scheduler improvements, especially for models with large layers
remember_allocationsargument added tovollo_compiler.ProgramBuilderto help fit more models in multi-model programs
23.1.0
- Add initial support for Alveo V80, further performance optimisations still outstanding
- Add support for Napatech NT400D11
- Add support for vfio-pci; use
load-kernel-driver.sh vfioto load it, required for V80 - Add lock to Vollo RT to prevent concurrent usage of the accelerator
- Improve VM cycle count estimates for Agilex devices
- Additional model support:
- Add support for broadcasting non-constant tensors except along the data dimension
- Add grouped convolution support to
vollo_torch.nn.PaddedConv1d - Add support for reshape operations
- Changes to the API of
vollo_torch.nn.Scan: thestepfunction now returns an output tensor and a separate state tensor instead of a single tensor; theforwardmethod now takes both aninput_axisand anoutput_axisinstead of a singleaxisargument
22.1.0
- Update compatibility with newer IA420F boards (IA420F-0015)
22.0.1
- Allow weights to be shared in multi-model programs
22.0.0
- Add support for compiling models with multiple input tensors and multiple output tensors
- Improve accuracy of LSTM unit
- Change behavior of VOLLO_FP32_ROUND in Vollo RT so that it's enabled by default; set to 0 to truncate f32 inputs
- Change
vollo-tool reset --pcitovollo-tool reset-pci - Expand supported PyTorch stacking and concatenating operations:
concatenate,stack,vstack,hstack,row_stack,column_stack,dstack - Expand supported PyTorch transposition operations:
permute,swapdims,swapaxes,t,T,mT
21.1.1
- Initial support for
torch.nn.LSTM - Performance improvements in VM simulation, especially for LSTMs
- Improve error messages from
vollo_torch.fx.nnir.to_nnirfor unsupported field accesses (getattr) in PyTorch model - Add
f32_roundargument tovollo_compiler.VM.runmethods to choose whether to round or truncate f32 inputs (previously always rounded) - Fix handling of non-contiguous input arrays/tensors in Vollo RT Python bindings
- Fix bug in
streaming_transformfor tensor sum reductions
21.1.0
- Support tanh
21.0.0
- Runtime/bitstream optimisation for small inputs (using MMIO instead of DMA)
- Scheduling and architecture optimisations
- Add
resetsubcommand tovollo-tool - Support ReLU via
torch.relu
20.0.3
- Separate bitstreams from Vollo SDK
- Add c2b64d hw config to support models up to 8M parameters (bitstream and compiler)
- Improve compiler error messages
- Fix example build
20.0.2
- Fix for incorrect
vollo_rt_accelerator_num_coresintroduced in 20.0.1
20.0.1
vollo_rt_add_vmto test thevollo-rtAPI without an acceleratorvollo_rt_load_program_from_bufferandvollo_compiler.Program.{save,load}_bytes- Add
vollo_torch.nn.RecurrentStateLSTMfor modelling streaming LSTM models across forward passes - Codegen fix for
vollo_torch.nn.Scan - Fix incorrect input validation for
torch.sumlayers - Change vollo-rt example to compile with older C compilers
20.0.0
- Add support for LayerNorm
- Add support for RMSNorm
- Add support for sqrt operations (
torch.sqrtandtorch.rsqrt) - Add support for summing over the data dimension
- Add
cycle_count_per_inferenceandcompute_duration_per_inference_usProgram methods - Add support for a wider range of torch arithmetic operation aliases
19.2.3
- Downgrade glibc dependency to support systems with glibc >=2.17
19.2.2
- Add support for
torch.div,torch.Tensor.div - Fix compiler code generation bug for division
19.2.1
- Add support for scalars on the left of division
- Add support for
Reciprocalnode in ONNX frontend
19.2.0
- Add support for division by non-constant tensors
- Fix slicing in ONNX frontend
19.1.1
- Fix compiler bug in constant folding
19.1.0
- Add support for partial updates of input data on the accelerator
- VM simulates Vollo accelerator bit-accurately:
bf16_precisionargument renamed tobit_accurateand enabled by default vollo-toolincludes license self-service- Performance improvements due to DMA optimization
18.0.2
- Add
optimize_transformsoption to the compiler to improve program schedule in some cases
18.0.1
- Add fallback to Vollo RT and vollo-tool for when AVX is not available
18.0.0
- Vollo RT support for using raw DMA buffers to skip IO copy
- Vollo RT remove redundant/noisy warnings on error: it is the user's responsibility to check returned errors
- Compiler optimization for Where nodes
- Compiler scheduling optimizations
- Vollo IP Core public documentation
0.17.1
- Fix vollo-tool compatibility with older bitstreams
0.17.0
- New DMA engine that reduces IO latencies by ~1.3us
- Initial support for non-streaming LSTM
0.16.0
- Vollo IP Core now available on request
- Add C library for configuring IP Core:
vollo-cfg - Support for slicing/concatenation in the middle of models
- Support for BatchNorm nodes
- Support for Scan/LSTMCell nodes
- Add
--io-onlyoption tovollo-onnx - Add
program-metadatacommand tovollo-tool - Fix compiler bug with transposing streaming dimension
- Fix accelerator bug in initial state of streaming models
0.15.0
- Accelerator bug fix
0.14.0
- Support for filtering dropout layers
- Instruction packing improvements
- LSTM performance improvement
- Improvements to weight sharing
0.13.0
- Support for multi-model programs
- Provide Python bindings to Vollo RT:
vollo_rt - Improved support and error messages for tensor indexing in compiler
- The unweave transform is now automatic
0.12.2
- Support for LSTM nodes in ONNX frontend
- Support for squeezing, unsqueezing, reduce sum, using
unweavetransformation - Improved error reporting in
vollo_torchlowering to NNIR
0.12.1
vollo-torchfix type hints being incompatible with Python 3.7/3.8vollo-rt.hfix namespacing issue (error_t->vollo_rt_error_t)- Runtime optimisations
- Added IO only benchmarks
0.12.0
- Initial support for ONNX models in compiler
- Support for LSTM nodes
- Improved error reporting in compiler
- Compiler API changes
- New runtime API with access to model metadata
- HW optimisations (pointwise operations)
- IA840F support
0.10.1
- Support for scalar (
int,float) literals in pointwise operations invollo-torch.
0.10.0
- Architectural changes in bitstream to support compiler
- Reduced latency from reduced core to core communication in the bitstream
- Add general model compiler and VM simulation with Python bindings in
vollo-python - Add PyTorch frontend to model compiler in
vollo-torch